Tech File: Imagenex 881AL-GS Gyro-stabilized Scanning Sonar
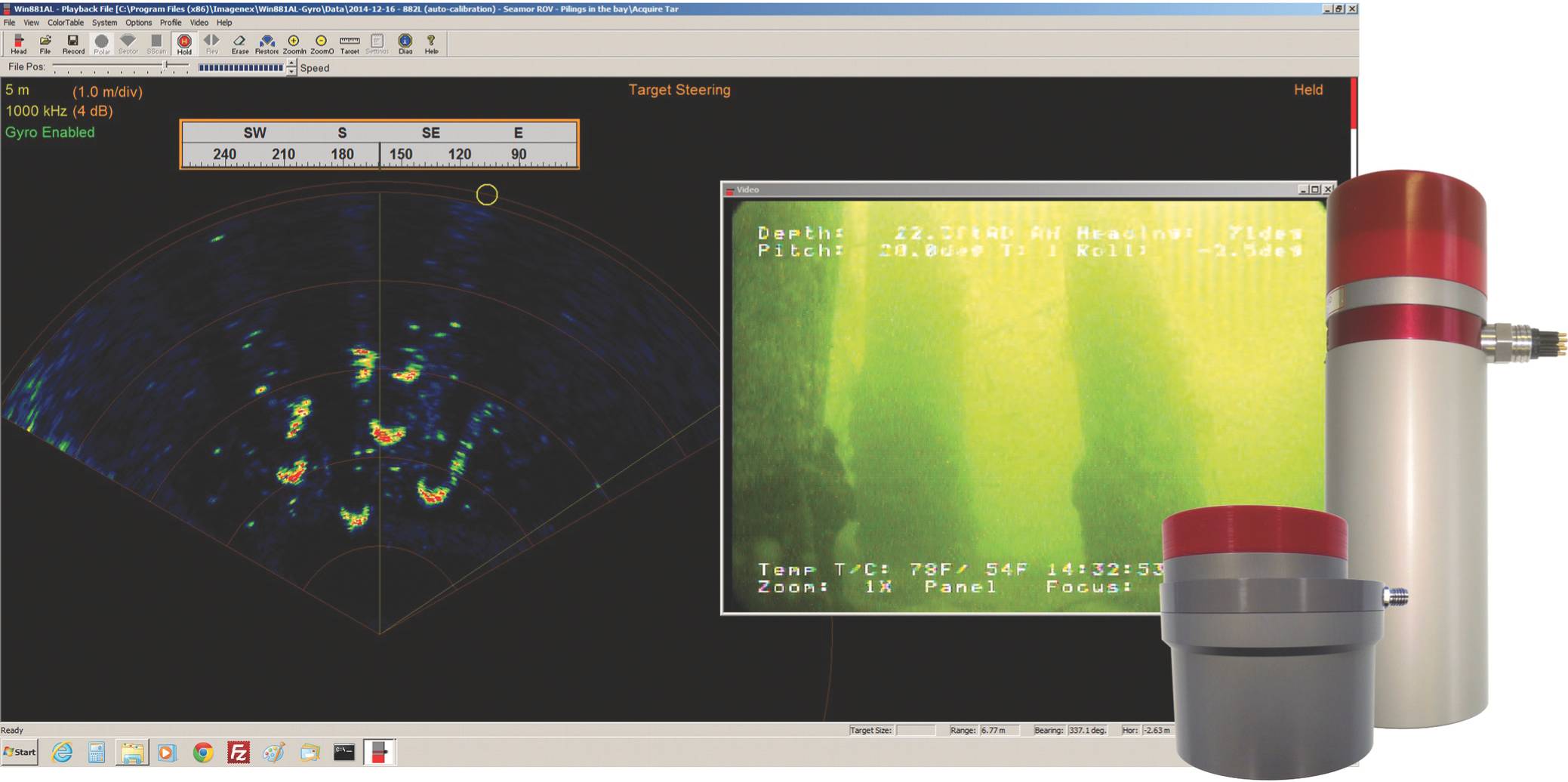
Image: Paul Unterweiser
The Imagenex model 881A-GS, 881L-GS (881A/L-GS) and 882-GS are gyro stabilized, high resolution scanning sonars. Manufactured in Canada, the 881A/L-GS is available in models built to withstand depths up to 10,000 meters and can scan and display targets from 0.2 to 200 meters away. Available with either an RS-485, RS-232 or Ethernet interface gives the user a wide range of options for integration into an existing underwater platform.
The principal benefit of a gyro stabilized sonar is that it can produce a clear sonar image regardless of how the host vehicle may be moving. That clear image is the key capability that allows the software controlling the sonar to incorporate more complex functionality. In the case of the 881A/L-GS, one advanced feature that proved itself invaluable (to be covered in greater detail later), is target focused scanning.
The package I received from Imagenex included the 881AL-GS gyro-stabilized sonar, four lead pigtail for integration into my ROV, software and documentation on a CD, and an RS-485 to USB interface (which is available as an option). It differs from the model 881A-GS or 881L-GS in that it is intended to be mounted horizontally which allows it to be used with smaller, low profile underwater vehicles such as ROVs and AUVs. The only other component I added was a voltage regulator to convert my ROV’s nominal 14.8 volts to the 881AL-GS required 24 volts. Fortunately, the power requirements of the sonar were minimal (less than 7 watts) so a tiny off the shelf regulator was all I needed to complete the integration. The 881AL-GS size and shape are a bit different from other sonars I’ve used. The main housing is an aluminum tube with a red polyurethane transducer mounted at one end at 90 degrees. The entire unit is roughly 28 cm in length and weighs 1.6 kg (in air) and so needs to be mounted on a vehicle capable of handling a sonar of this size.
Mounting the sonar is straightforward but the mounting location must be chosen carefully, allowing both unobstructed sonar transmission while also protecting the transducer from damage. The sonar may be mounted transducer “up” or “down” providing more options when choosing a mounting location.
I divided my testing of the 881AL-GS into three parts: initial setup and bench testing, static testing in the water and fully operational testing at a dive site.
Bench test
Once I had all the components necessary to integrate the sonar, setting it up was straightforward.
Two leads of the sonar’s pigtail supply power and the other two are for RS-485 serial communications. I installed the supplied software and drivers (initially on a 10” Windows tablet and then later on a laptop), connected the sonar to the serial/USB interface and supplied power to the sonar. I launched the software, selected the COM port, and a few seconds later it was working. I have to say that setting up the sonar was considerably easier than what I was expecting. The system automatically starts an initialization and calibration process as soon as it has power. A few seconds later it’s ready to go. With the sonar running on the bench I took a few minutes to familiarize myself with the included software. The software interface, just like the integration, was straightforward and simple to use. At the top of the screen are icons and pull down menus. To the right are larger icons for the most frequently used functions (which just happen to be ideally sized for touch screen use as well) and the remainder of the screen is filled by the sonar display. There is an option in the settings for a separate video window so both video and sonar can be displayed and controlled via the same software interface.
Static test
My first “in the water” test was conducted in conditions typical for the coastal estuaries of North Carolina. The bottom was a combination of silt and weeds with a depth ranging from 0 to 10 meters. Visibility was less than 1 meter, making navigation without a sonar virtually impossible. Potential sonar targets ranged from soft sand banks to hard oyster beds and a variety of steel and wood pilings.
Although I used a 10 inch Windows tablet during the bench test, I decided that in the field a larger screen would be easier to see so used a 15 inch laptop instead. The 881AL-GS was mounted to the under-side of our mini ROV and launched alongside a floating dock. My objective was to become familiar with the 881AL-GS and software while keeping the ROV as stationary as possible. The ROV was kept just below the surface and held in place using thrusters and tether tension. I ran the sonar at various ranges and levels of gain to get a feel for the submerged terrain and obstacles.
After letting the sonar run for a few minutes, I decided to give the “acquire target” feature a try. This feature allows the operator to select and direct the sonar’s beam towards a contact on the display. The gyro-stabilization is then employed to track the selected target regardless of where the ROV (and transducer) may be pointing.
I picked what looked like a small oyster bed 30 meters from the ROV’s position, selected the “Acquire Target” icon and then clicked on the oyster bed on the screen. The display then changed from full 360 degrees of sweep to a 120 degree sector centered on my oyster bed. I then pivoted the ROV while holding position and watched as the sonar sector on the screen matched whatever movement the ROV made. The smaller sonar sector and quick response of the gyro resulted in quick refresh rates of the painted target. I could immediately see that this could be an enormously useful tool in any application where a scanning sonar is required for navigation.
Operational test
Operational testing was conducted in similar conditions as the static tests. Visibility was less than one meter so I navigated entirely with compass heading, depth and sonar.
Immediately after launching the ROV, I did a full 360 degree “polar” scan of the surrounding area out to 100 meters to help visualize the underwater terrain. Setting the sonar display to “Heading Up” I had a clear picture of the terrain and identified a series of wooden pilings roughly 10 meters away. I changed the sonar range to 10 meters and then flew the ROV to the piling. The gyro-stabilization did an excellent job of keeping the displayed image clean and understandable as I flew the short distance to the piling. The Imagenex software display includes a “yellow circle” that swings around the circumference of the polar display indicating the current heading of the ROV, in addition to a compass heading graphic at the top of the application window. This feature made flying towards the piling easy. I repeated the same scenario with targets at roughly 15 and 20 meters with similar results. Without gyro-stabilization I would have needed to stop every few minutes, allow the sonar image to stabilize and then reorient myself to the ROV’s new position before continuing towards the contact.
The next mission took place near a highway overpass. Conditions were similar to the earlier mission with the addition of roughly half a knot of current caused by an out-going tide. Repeating the steps from earlier missions, I identified a concrete piling on the sonar roughly 50 meters away.
With the sonar in “Target Steering” mode, I clicked on “Acquire Target” and then clicked on the bridge piling. The display immediately switched from a full polar sweep to a 120 degree sector centered on the piling in the distance. Watching only the heading display and sonar contact while maintaining a depth of roughly 3 meters, I flew the ROV towards the contact. Every time the ROV turned, veered or pitched, the sonar display instantly responded with an equal, compensating movement on the display.
I did notice that, over a longer period of time, the target did seem to drift a degree or two, but this is expected of any gyro stabilized system. Although I didn’t feel this small amount of drift required it, I could have simply selected “calibrate gyro” from the top, pull-down menu to eliminate any amount of drift that may have accumulated. Based on my field experience with the Imagenex 881AL-GS, I felt that as long as I was able to locate a target on the sonar I could navigate to that target regardless of what the ROV might be doing.
Closing thoughts
Overall I was very impressed with the performance of the Imagenex model 881AL-GS. Construction was excellent. Installation of the software and integration of the hardware into our ROV’s system were both easy and straightforward. Using the 881AL-GS was equally straightforward and the included software provided all the features and information I needed.
But what made the 881AL-GS really stand out was its gyro-stabilization. With gyro-stabilization, scanning sonar becomes a very effective tool with a number of key benefits, including: sonar targets are more easily identified; the ROV doesn’t need to stop to stabilize the sonar image, thus transit time to a target is reduced; and bottom terrain and obstacles are more clearly defined and thus more easily avoided.
These benefits make the Imagenex GS family of gyro stabilized sonars ideal for any application where a scanning sonar is required, but would be especially suited to search and recovery (SAR) and operation in limited visibility.
The Author
Paul Unterweiser is a retired U.S. Navy officer, USCG licensed master, ROV pilot and, for the last 10 years, president of Marine Simulation, a software company located in North Carolina specializing in developing training simulators for ROV pilot schools and other marine industry applications.
(As published in the September 2016 edition or Marine Technology Reporter)