Virtual 'Dolphins’ Make Marine Robotic Software a Success


-
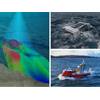
 Image of Thomas on Loch Ern courtesy of Kyle McNally, SeeByte 2015
Image of Thomas on Loch Ern courtesy of Kyle McNally, SeeByte 2015
-
 Image of Thomas on Loch Ern courtesy of Kyle McNally, SeeByte 2015
Image of Thomas on Loch Ern courtesy of Kyle McNally, SeeByte 2015


Software that could better enable a fleet of robotic vehicles to work together to perform tasks such as seeking and tracking whales and dolphins, has been successfully trialled in Loch Earn, Scotland.
This software acts like a ‘central brain’, making decisions about where the robots should go based on the changing environment around them, which is measured using in-built sensors. The trial was conducted by SeeByte and ASV with support from the National Oceanography Center (NOC).
The trials are part of a two-phase competition managed by NOC as part of a Small Business Research Initiative. The software was developed by SeeByte and integrated into the robotic autonomous surface vehicle ‘Thomas’, which was developed by ASV and is owned by the NOC.
SeeByte’s Neptune software successfully trialled dolphin tracking capabilities by getting ‘Thomas’ to adapt its course in response to ‘virtual dolphins’. These were part of a computer simulated environment that was ‘layered’ onto the real environment of the Loch to enable the software to be tested against specific scenarios. The vehicle also performed a survey of an area of the Loch to track a geological feature. During this survey the Neptune software was able to modify the course of Thomas if it strayed too far from the feature. Neptune already forms the basis of UK Maritime Autonomy Framework. However, it has been extended as part of this project to allow robotic vehicles to perform specific behaviours.
The National Oceanography Center (NOC) is facilitating this project by offering expertise in integrating sensors into marine robots, as well as providing real world scientific ‘problems’ to test the software against. Additionally, the NOC is providing the companies involved in this competition with world leading marine robotics testing facilities in the Marine Robotics Innovation Center, which is due to open in Southampton on November 23rd.
Called the Autonomous Adaptive Ocean Sampling Network (AAOSN), this two-phase competition was launched last September. The initiative was made possible by the Natural Environment Research Council (NERC) in partnership with the Defence Science and Technology Laboratory (DSTL) and Innovate UK, with $2.2 million of funding available for the project. Phase one saw nine consortia submit feasibility studies, five of which were funded. After a review of the outcomes of the phase one studies, two consortia were invited to apply for phase two for the development of prototypes, which would be capable of undertaking demonstration missions at sea.
The two consortia moving forward to the final stage are led by SeeByte in partnership with ASV and the Marine Biological Association (MBA) and University of Exeter in partnership with Marine South East Ltd and the Met Office.