Designing an HD Camera Platform for the Future

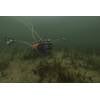
SubVIS ORCA Camera (Image: Imenco)
April 2015 will see Imenco bring its latest camera platform, the SubVIS Orca, to market. This will feature HD over Ethernet compatibility.
For the last 10 years, most cameras have operated by capturing a digital image and converting it into an analogue composite video signal for subsequent transmission. At the surface this signal is displayed onto a monitor.
Some alternative systems reconvert this back into a digital signal (either inside or outside the camera), and send it up the umbilical. The digital signal is then fed into a PC and viewed on a monitor.
Three years ago, Imenco reviewed the camera market and took the view that analogue cameras would become a thing of the past, with HD becoming the preferred format over time. When Imenco looked to enhance its new camera developments however, the company not only decided to update the hardware, but also sought to change the actual platform and run the digital format over an Ethernet-based system.
"Ethernet is an increasingly popular way of connecting with subsea equipment," said Jan Wulfsberg, Senior Applications Specialist at Imenco in Norway who has led the development of the new SubVIS Orca camera with his colleague John-Arne Birkeland. "Most sonar for example, are digital and 90% of them work over the internet. We decided to develop a future camera platform that could be added to this network.”
"Network integration opens up new possibilities. You can let the camera take one picture at very low frame rate/high resolution or high rate/low resolution. You have all the possibilities that are normally only seen in fixed stills cameras. The main advantage of using Ethernet is that it is a fully proven system developed and paid for by the computer industry. The components are cheap and standardized. An Ethernet control system does not require the numerous racks of electromechanical switches that are the hallmark of many existing pieces of control equipment."
An Ethernet compatible camera can be simply construed as a simple building block within this network. It would be technically possible to plug such a camera into an office Ethernet cable system, type in the IP address and have a picture on any computer screen on the network, with the information recorded on high capacity hard disks.
"When approaching the basic design, we had three main options," said Wulfsberg. "Firstly we could take an off-the-shelf computer board and camera, and insert these fundamental components into a large subsea pressure canister. The second option would be to purchase a closed circuit television (CCTV) Ethernet camera and enclose it in a subsea housing. While some companies have chosen to follow these paths, we thought that they would not allow us to fully control the camera, and how the way it handles video signals, in the manner we would have liked."
“The third option was to take the optical module and purpose-build a computer solution around it.” That is precisely what Imenco has done with its new SubVIS Orca camera. "We have effectively built a computer which, in many ways, is analogous to a smart phone, based on the same technology, but without a screen. It employs low power components that have become available at a reasonable cost through mobile phone telephony," said Wulfsberg. "One of the main reasons we decided to invest in building our own computer was to have better control over latency."
Latency is the time taken for a signal at the camera to be received at the monitor. For a subsea camera, it can be practically described as the delay between an action happening underwater, for example, with a manipulator arm, and what the control room sees. The lower latency, the more control the ROV pilots have. Imenco set themselves a target of no more than 150 milliseconds. At the moment, results are coming in at 100 milliseconds.
On top of this platform, Imenco intend to build a range of new models, starting with a main ROV camera. Imenco have completed the first five prototypes, one of which will be shown at the Ocean Business exhibition in Southampton during April where Imenco UK Ltd will share stand B10 with their Middle East agent Indepth International Ltd. All the cameras have undergone rigorous testing, both internally and in association with a major ROV manufacturer.
"When we talk with the ROV manufacturers and operators, they recognize that assimilating functionality or smartness into their digital video gives them a competitive edge,” said Wolfsburg.
"Building the computer system gives us the ability to incorporate applications in the same ways that 'apps' are used in mobile phones.” This is helped by having access to the raw format before it is encoded. "A permanently placed camera, for example, can be used to detect leakage while elsewhere the settings may be tailored to recognize collision. While it is not possible to carry out exact measurements, it is possible to make estimates based on what else is in the picture."
While these apps will be available to users, and that third-party software developers may launch others, Imenco anticipates that some companies will integrate the platform into their own in-house systems. "For this reason, we have made it an open source system," said Wulfsberg. "It is likely that operators will have a good understanding about what they intend to use the platform for. If they want to make changes, we can work together with the customer. However they will also be able to make their own software modifications. The platform allows them to interface with it quite easily."
Typical of these is video picture and enhancement. Imenco intend to introduce options for computer analysis, based on what is displayed in the video. This will help the operator when making decisions. It will do more than just give the ROV pilot a picture. Imenco see that its main benefit is what happens in the back office.
Imenco is currently assembling cameras that companies can integrate with their own control systems for testing. The final versions will be slightly smaller than the prototypes. The basic shape looks slightly like a classic old flashlight with a broader front than the main housing. The SubVIS Orca measures about 140mm at the largest diameter and is around 230mm long. Because the computer electronics sits within the camera body, this limits Imenco’s ability to make much smaller versions. Similarly with the lens shape. When Imenco set out to design its next generation camera, the lens became a key consideration.
"The need to improve the lens system is something we learnt the hard way," said Wulfsberg. "Over the years, we tried to get the stable supply of water corrective lenses that are necessary for subsea cameras."
When a ray of light passes into a lens, its path deviates because of the refractive index of the glass. This is not significant when the camera operates in air because, if the ray deviates, 10deg on entering the lens, it deviates back by the same amount when exiting, effectively cancelling each other out.
"This is not the case, however, when one side is surrounded by water," said Wulfsberg. "The water/glass interface effectively causes the light ray to deviate by about 15%. While a typical camera lens requires a viewing angle of around 72deg, the natural refraction in the glass means that the effective viewing angle drops to nearer 50deg."
"Designing a lens to produce an effective viewing angle of 72deg can produce a fisheye effect, even in a high quality lens. On land, it is possible to buy panoramic lenses that better compensate for the fisheye effect, but we've never found anything that can do that subsea.”
“These are far from optically perfect because when the camera zooms, the lens moves mechanically so the focal point in the camera changes. In some cases the image that this produces is acceptable but then soon deteriorates with serious edge distortion.”
The solution Imenco have chosen is a double lens system. The first concave glass lens is designed to correct for the water. The second lens is, therefore, incorporated to compensate for the errors that the first lens introduces, and bring the entire image into focus.
Lens and housing is designed to achieve maximum optical quality and angle of view in water. "In theory, we could miniaturize the camera if we wanted to narrow the opening angle and do without water correction, but this is not a route we intend to take. One option, however, may be to house the computer part into a separate container somewhere in the ROV and maybe use this as a hub," concluded Wulfsberg.