MTR100: Underwater Cameras, Lights and Ocean Landers

Figure 1. Stony Brook University PhD candidate, Ashley Nicoll, assembles the interior mount for a GoPro Hero/CamDo Blink controller time lapse underwater camera. The springs are used to gently press the camera against the interior face of the acrylic viewport. Read about Ashley’s MS project in Lander Lab #2, MTR, Vol. 65, #3, March/April 2022. (Photo by Kevin Hardy, Global Ocean Design.)
Observation is the first step of the Scientific Method. “What’s that?”, leads to research, hypothesis, and then all the rest that ends in “discovery”. When we can’t send humans to look, we send the robots.
Scripps Professor John Issacs developed his first deep sea “Monster Camera” in the 1960’s from surplus WWII aircraft nose cameras. His observations lead him to realize that photographs identify species, while film shows behaviors. It was another Scripps professor, Richard Rosenblatt, who counseled Issacs to look at fish from the lateral side view, not the dorsal top-down view.
Jacques-Yves Cousteau spoke of undersea vistas as “a world without sun”. A fair point, even if filming is being done within the photic zone, night creates the need for artificial light. Deep water is perpetually dark.
Cameras, also called “imagers”, are almost exclusively digital. The mission goals define the required camera features. An ROV reading gauges may only need black-and-white images from a monochromatic red LED so fish are not attracted to the front of the vehicle, obscuring the pilot’s view.
Underwater camera applications run from ocean landers (this column’s focus), AUVs (closely related to ocean landers), ROVs, fish farms, IOOS Nodes, inshore service, and many others.
Camera features include choice of power source (battery or tether), intervalometer or topside control, low light sensitivity, and self-recording or remote recording.
Cameras and Ocean Landers
Landers have unbeatable persistence on the seafloor. Landers can be placed at the junction of undersea canyons and ravines that act as trails and pathways for undersea animals. Measurements of environmental conditions, such as oxygen, turbidity, and temperature, can be correlated to animal populations, distribution, behavior, and potential speciation.
Baited lures bring animals in for better images. Short term deployments may have baited traps to collect species for DNA typing. Images give the context of those collections.
Cameras and lights can be hard mounted to a frame, held by a single-axis rotator, or mounted to a 2-axis pan-and-tilt. Vehicles such as ROVs and AUVs change views using the mobility of the vehicle itself. Landers can be made to pirouette on the seafloor, rotating up to 720°, to capture an entire panorama of its landing site. This was dramatically shown during James Cameron’s DEEPSEA CHALLENGE Expedition with DOV MIKE in the Sirena Deep of the Mariana Trench in 2012.
Experimentation
Landereans can inexpensively explore camera systems by building their own. The path to discovery and understanding can begin with a simple system based on a board camera or POV (Point-of-view)/Action camera, such as a GoPro. Keep It Simple, Sailor (KISS). Start with the camera, add the recorder, add the lights, add the intervalometer add the housing. Packaging and PCBs come after you work out the circuit details.
 Figure 2. A 13MP high resolution board camera. (Photo courtesy of e-con Systems)Cameras
Figure 2. A 13MP high resolution board camera. (Photo courtesy of e-con Systems)Cameras
Board cameras come with optical devices and CMOS image sensors mounted directly on a circuit board, providing an integrated, small volume design. You’ll find a variety of choices, including resolution, auto-exposure, sensitivity, frame rate, video output, color/black-and-white, and others. Some are specifically made to interface with Arduino, Raspberry Pie, or other programmable boards.
Prices vary, but start as low as $6. Many have the CMOS imager dead center on a square mother board, perfect for fitting into a cylinder. A shallow water housing can be as simple as a PVC cap with a flat acrylic viewport bonded to the front as often seen in the MATE ROV contest.
A “bullet” or “lipstick” camera is a very small video camera roughly the size and shape of a tube of lip balm. A USB digital 50-500X magnifying bullet camera sells for around $20 that could be used for extreme close-ups of in-water or seafloor objects.
POV/Action cameras
Action cameras, such as the GoPro Hero, are small, rugged digital cameras designed for capturing first-person action shots. Newer models include image stabilization, autofocus, and high-speed processors. MicroSD card storage is common, with capacities up to 1Tb. Though the GoPro Hero internal battery has a short life, the camera can be powered through the CamDo from an external battery.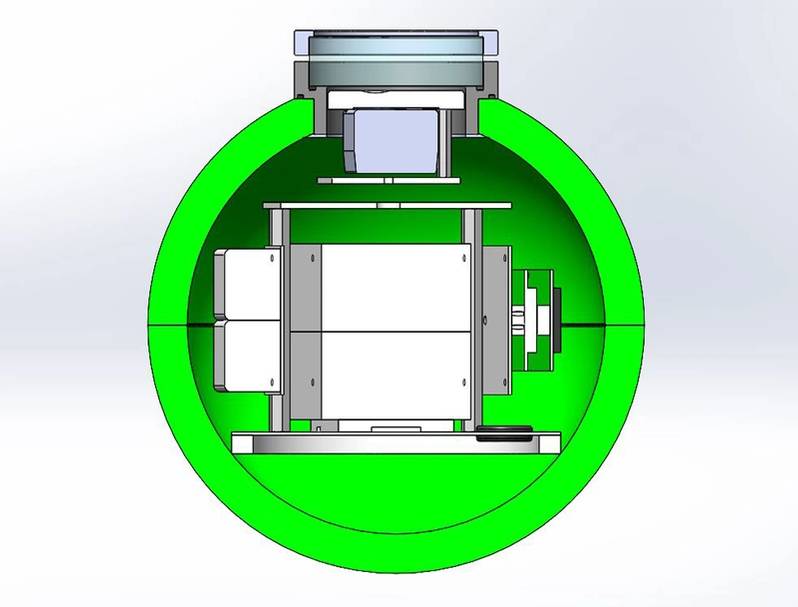 Figure 3. A GoPro/Hero 4 Black with CamDo controller fits inside a 10” polyamide sphere with viewport. There is room to spare for two 4S 10,000mAh LiPo batteries with individual BMS, two LED drivers, two MOSFET power transistors, and a voltage regulator to power the CamDo and GoPro. Not shown are through-hull penetrators, the vacuum/purge port and equatorial o-ring in the bottom hemisphere. The housing as shown can hold a Sony A7Sii with a 12.2MP full frame 35mm CMOS sensor with a lens. The Sony offers ISOs of 50,000 and higher. There is room inside the sphere for an Arduino controller, LED drivers, and voltage regulator to power the Arduino and Sony camera. A second 10” sphere would contain the LiPo batteries. Thanks to Larry Herbst for pursuing the Sony camera application. (Image courtesy of Global Ocean Design)Time Lapse Controller/IntervalometerI highlight the CamDo BLINK controller as one I have had good experience with. There are others, such as Group B (see below) that look interesting. Some hacker work could be done to interface other camera models through their WiFi and Bluetooth remotes.
Figure 3. A GoPro/Hero 4 Black with CamDo controller fits inside a 10” polyamide sphere with viewport. There is room to spare for two 4S 10,000mAh LiPo batteries with individual BMS, two LED drivers, two MOSFET power transistors, and a voltage regulator to power the CamDo and GoPro. Not shown are through-hull penetrators, the vacuum/purge port and equatorial o-ring in the bottom hemisphere. The housing as shown can hold a Sony A7Sii with a 12.2MP full frame 35mm CMOS sensor with a lens. The Sony offers ISOs of 50,000 and higher. There is room inside the sphere for an Arduino controller, LED drivers, and voltage regulator to power the Arduino and Sony camera. A second 10” sphere would contain the LiPo batteries. Thanks to Larry Herbst for pursuing the Sony camera application. (Image courtesy of Global Ocean Design)Time Lapse Controller/IntervalometerI highlight the CamDo BLINK controller as one I have had good experience with. There are others, such as Group B (see below) that look interesting. Some hacker work could be done to interface other camera models through their WiFi and Bluetooth remotes.
Biofouling
Long term deployment of cameras in the photic zone will certainly suffer from marine growth. Severn Marine Technologies (MD) <https://clearsignalcoating.com/> is developing clear biofouling solutions for undersea optical instruments. Other solutions, like wiper brushes and UV LEDs, have been demonstrated.
Lights
LEDs are ubiquitous. Light goes out the front, while heat goes out the back, making the housing design straightforward. Various approaches to covering the LED in clear materials have been devised, from acrylic flat plates to clear silicone rubber sheets. Some cast the LEDs in a block of clear acrylic. Heat is the principal enemy of LEDs. Much has been written about topside luminaire design, including the use of heat transfer material behind the PCB to carry the heat away from the LEDs (google “CREE LED Luminaire Design Guide”). LEDs are completely pressure tolerant as they have no compressible volume. A pressure compensating fluid, such as mineral oil may be used. Avoid silicone oil has the cast dome on an LED is often silicone, and may be affected by immersion in a fluid of a similar nature.
Tip: A reasonably good 30-watt, 2600 lumen LED array is <$10 and 12-24vdc input LED driver is <$9 plus shipping at <www.mpja.com>.
If using a MOSFET as a high-power switch to control the lights, look for the RDS(ON) value, “Static Drain-to-Source On-Resistance.” This is the voltage (VGS) that needs to be applied to the gate to fully switch the MOSFET on. Depending on the part you select, this will be between 4v to 10v. I look for MOSFETS that fully saturate at logic levels of 5v, such as the IRL540. A helpful review of MOSFET circuits is found at <www.electrical4U.com/mosfet-circuits/>. A useful MOSFET worksheet is at <www.addohms.com/mosfet-guide/>. Figure 4. A Global Ocean Design Picolander carries a GoPro Hero 4/CamDo self-powered, self-recording camera with two external lights to depths up to 2km. Lights are best located away from the camera to minimize backscatter in cloudy water. The expendable anchor and dual burnwire release elements are not shown. The vehicle is approximately 13” wide x 24” tall, and hand deployable. (Photo by Kevin Hardy, Global Ocean Design.)Commercial firms that manufacture self-powered/self-recording underwater camera and light systems include:
Figure 4. A Global Ocean Design Picolander carries a GoPro Hero 4/CamDo self-powered, self-recording camera with two external lights to depths up to 2km. Lights are best located away from the camera to minimize backscatter in cloudy water. The expendable anchor and dual burnwire release elements are not shown. The vehicle is approximately 13” wide x 24” tall, and hand deployable. (Photo by Kevin Hardy, Global Ocean Design.)Commercial firms that manufacture self-powered/self-recording underwater camera and light systems include:
Commercial firms that manufacture tethered underwater lights and cameras include:
- Arctic Rays (FL)
- Barlus (CN)
- Birns (CA)
- DeepSea Power & Light (CA)
- Deep Trekker (ON)
- Deepwater Exploration (CA)
- Imenco (UK)
- J.W. Fishers (MA)
- MacArtney/Luxus
- Outland Technology (LA)
- Reach Robotics (AUS) (formerly Blueprint Labs)
- Remote Ocean Systems (CA)
- ROVSCO (TX)
- Sidus Solutions (CA)
- SubAqua Imaging (CA)
- SubC Imaging (NL)
- Teledyne Marine/Bowtech (DK)
Conclusions
Building you own underwater imaging system provides insight to what manufacturers have faced, and what questions to ask sales reps. You can see the engineering behind a commercial design because you’ve done it. You can also spot mistakes. Cameras for ROVs, which are in and out of the water frequently, can get away with some dissimilar materials, such as a 316SS snap ring to hold a viewport into an anodized aluminum body, as the vehicle gets rinsed off after every dive. Not great design practice, but manageable.
The same camera on an IOOS node will see constant exposure right through to failure by galvanic corrosion. I’ve also seen a manufacturer who laser engraved the company logo and serial number right through the black anodize layer to the aluminum substrate. Those shiny silver letters are bare aluminum.
Many parts can be purchased by an experimenter very cheaply. Those are the best to learn with. One failure doesn’t cost a lot. When it really matters, though, spend the money on better components, and do lots of testing pre-deployment. Cree LEDs produce more light per watt, so less heat, and their footprint is smaller, so the housing is smaller. LUXdrive and Meanwell make small and efficient LED drivers. Check out www.ledsupply.com.
Further Reading
DeepSea Power & Light (San Diego, CA) has published numerous articles on undersea lighting and imaging.
•Christ, Bob; Wernli, Bob, The ROV Manual, Second Edition, Waltham, MA, Butterworth-Heinemann, 2014
•Moore, Steven; Bohm, Harry; Jensen, Vicki, Underwater Robotics, Hong Kong, Marine Advanced Technology Education (MATE), 2010
•Cross, E.R., Underwater Photography and Television, New York, Exposition Press, 1954, a seminal early text