How AUVS Can Spot Oil Plumes After an Ocean Spill
chemical sensors, or collect a water sample to understand more about the composition of the oil itself.Into the depthsWe’ve carried out several marine oil pollution search missions using proxies for the oil in a sheltered coastal environment in Holyrood Bay, N.L. One of these was to design a search pattern that maximized spatial coverage, and reduced the total search time and distance travelled needed to find an oil spill of interest. Another tested the effectiveness of the backseat driver control to direct the AUV.The tracking missions have been successfully tested in computer simulations and
NATO employs MUSCLE Memory to Find Mines
;central processing units and graphical processing units--so it can do a lot of parallel processing. We have enabled the Bluefin MUSCLE to see underwater in real-time, and thus by looking at the images, determine what to do next.”Been said MUSCLE can start off with a ‘radiator’ search pattern, and depending on the visibility and the performance of the senor, which is based on the environment at that time, it determines the spacing of the radiator pattern. “You don’t want to have gaps, so you need to optimize that. The advantage of having that data available and the

Seafloor Crawlers: New Robotic Tools for Challenging Missions
fix when surfaced and is used as a cross-check on position. Shaft encoders on each drive side measure distance traveled.Accuracies of 2% of total range have routinely been achieved. Turn-in-place (TIP) and arc-turns are calculated to maintain path accuracy. Figure 2 illustrates a preprogrammed ladder search pattern along Wells Beach in York, Maine. Testing occurred while the tide was high and the system was submerged (note the photo is at low tide).In addition to the Sea Otter, a larger variant is available. The Sea Ox is a versatile subsea bottom crawler designed for mapping and sampling the ocean floor

Magnetic Sledge Aids Underwater Object Retrieval
that enables it to pass over rough or broken ground without damage or becoming snagged. Capable of working at any depth, the sledge can be equipped with a video camera and an acoustic positioning system such as a Sonardyne Scout linked to a GPS chart plotter. This enables it to follow an accurate search pattern and ensure that nowhere is missed. The sledge is typically fitted with buoyancy to offset the weight of the magnets so it can be handled efficiently and for the height at which it is towed above the seabed to be precisely controlled. The Miko magnetic sledge is a potentially useful

Long Beach FD Strengthens SAR Capability
in use with the department. The Mako will allow the divers longer search periods, due to less physical demand on the divers, also enabling programmed searches of a defined area. This allows the diver to concentrate scanning the area around him/her for drowned victims while the Mako DDS follows the search pattern. The goal of the Navigator was to decrease the time to find targets on the sea floor. Decreasing this time can help to bring the drowning victims recovery into that of the “golden hour”, in which victims have a far more likely hood of resuscitation. Coupling the Mako with the Navigator

Mine Detection Robot Performs in Bahrain
, Naval Undersea Warfare Center (NUWC), Division Newport and Northrop Grumman to prove the utility of mine hunting from an 11-meter unmanned surface platform. The MHU was remotely controlled and executed a preplanned mission by transiting to an operational area, deploying the AQS-24A, executing a search pattern and recovering the sensor. Real-time situational awareness data and sensor sonar data were sent via tactical data link to the command and control (C2) station to ensure safe operation while maintaining mission objectives. "We are encouraged by the progress made with MHU 1 and 2 in 5th

Metal Detector Adds Capability to ROVs
RMD-1 which they’ve attached to a Seaeye Falcon. Owner Arne Eriksson reports, “We used the system to do a job for Gardline Environmental Ltd at the Sheringham Shoal Offshore Wind Farm. The objective was to locate UXO targets (unexploded ordnance) acquired by towed magnetometers. We ran a search pattern over the area with the ROV and metal detector to determine the precise location of each target. The detector’s readouts were logged along with subsea position coordinates. Divers were then deployed to examine the objects found. The work was done over a 2 month period and we had great results

Coast Guard to Test Arctic Oil Spill Technologies
that has been performed by BSEE to evaluate several candidate sensors to establish a sensor suite capable of detecting and quantifying the thickness of oil from below the ice. The emphasis during this evaluation will be on system deployment and recovery, two-way communication, ice-bottom mapping and search pattern development. NOAA personnel will also employ the Environmental Response Management Application online mapping tool that integrates both static and real-time data for use during the exercise. The Coast Guard is providing one of its brushed skimmer systems to simulate recovery operations at
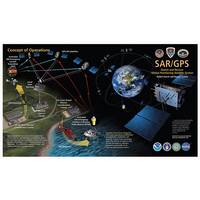
Search and Rescue Tech. Oceania
Honolulu Ocean Safety are coordinated to help where they are able. With the registration information from the EPIRB, watchstanders contact the man’s family to verify that he got underway alone. They confirm that the coordinates identified by Rescue 21 are in agreement with the EPIRB signal and search pattern areas are being drawn up with supreme confidence. The distant hum of a helicopter’s blades gives hope to the lost mariner. The aircrew arrives less than a mile away, deploying a self-locating data marker buoy, which will follow currents while signaling SAR assets on scene. This signal