Marine Technology Reporter Blogs - wcrov
Understanding ROV Launch and Recovery Systems – Part 2

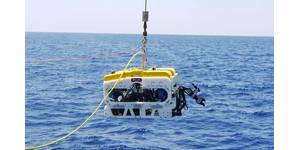
The main purpose of the heavy weather launch and recovery system is to stabilize and centralize the WCROV (Work Class ROV) and Tether Management System (TMS) with a device called a cursor which restricts horizontal movement while transitioning through the air/sea interface (called the splash zone). The splash zone presents the greatest risk of damage to the WCROV, TMS, and potentially the vessel. Large waves and high winds can cause the ROV and TMS to swing wildly, potentially impacting the vessel structure. As the vehicle is raised, this motion is amplified many times, which can make it difficult if not impossible to launch/recover the WCROV in foul weather. Another hazard is the close proximity of the WCROV to vessel hull mounted thrusters during entry and exit into the splash zone.
Understanding ROV Launch and Recovery Systems – Part 1

ROV system are vital to oil and gap E&P beyond saturation diving maximum depths. Full saturation diving has been conducted to depths of nearly 600 meters (2,000 feet). Beyond this depth ROVs are employed to undertake the diver’s tasks such as opening and closing valves, construction and equipment monitoring. In order to be deployed from the surface by support vessels, ROVs must be launched, recovered, and safely and efficiently operated using dedicated systems. Two systems are needed to successfully launch, recover and operate and ROV, these are the LARS (Launch and Recovery System) and TMS (Tether Management System). ROVs may be directly deployed from a simple crane…
AIV – Paving the way for an Autonomous Light Intervention Vehicle

When Subsea 7 and SeeByte collaborated in engineering the AIV, the world’s first purpose built Autonomous Inspection Vehicle, they were looking for a new cost-effective asset for inspecting LoF (Life of Field) projects. The AIVs software was designed to dynamically control this unique hover-capable vehicle, which is already being used in Subsea 7 LoF projects for general visual inspection. It can also be used as an aid to field survey, integrity management and developments continue, looking at expanding its use to light intervention activities. One of the advantages of the AIV over other AUV’s is its capability to hover, maintaining station when necessary. It also has the ability to operate directly from a host facility such as an FPSO or rig as well as from infield support vessels.