
NATO DIANA Program Enables R&D Contract with HonuWorx
NATO’s Defence Innovation Accelerator for the North Atlantic (DIANA), on behalf of Defence Research and Development Canada (DRDC) has awarded an R&D contract to UK‑based technology company HonuWorx, marking the first research and development contract awarded on behalf of an Allied nation under NATO DIANA’s Rapid Adoption Service.The contract follows DRDC’s decision to engage NATO DIANA and its Rapid Adoption Service to identify a DIANA innovator capable of addressing a Canadian capability need. Through this process, HonuWorx was selected to undertake a targeted engineering study

Kongsberg Maritime to Supply Rim-Drive Thrusters for Indian Research Vessel
its rim-drive thrusters for a new acoustic research vessel being built for India’s Naval Physical and Oceanographic Laboratory (NPOL). The vessel, under construction at Garden Reach Shipbuilders & Engineers (GRSE), will play a critical role in oceanographic and acoustic research for the Defence Research and Development Organisation (DRDO).The Kongsberg Maritime rim-drive thrusters were selected for their ability to meet exceptionally strict underwater radiated noise requirements, a key factor for acoustic research operations. By eliminating the traditional gearbox and using an electric rim-drive
Kongsberg Sells HUGIN AUV System to NIOT
after delivery.Kongsberg Maritime is the world leader in deep water AUV systems. Since the first dive in 1993 HUGIN has become the most successful AUV in the deep-water realm, with more kilometers surveyed than any other untethered underwater vehicle.Developed in partnership with FFI, the Norwegian Defence Research Establishment, HUGIN continues to improve with new capabilities, sensors and behaviors being added each year.“We are honored to welcome NIOT to the HUGIN family,” said Richard Mills, Vice President of Marine Robotics Sales at Kongsberg Maritime. “Their new HUGIN AUV System

Solus-LR AUV Ready for Testing
has a target range of 2,000 kilometers and is designed to stay submerged for multi-month missions.The long-range vehicle is being developed under a contract by Public Services and Procurement Canada, on behalf of the Department of National Defence’s (DND) science and technology organization, Defence Research and Development Canada (DRDC), under the All Domain Situational Awareness (ADSA) Science & Technology (S&T) Program. Sea trials and a capabilities demonstration in Indian Arm, British Columbia are expected to conclude by April 2020

Mapping the Future
for complex tasks.The solution is the common autonomous control engine to be used by unmanned and autonomous vessels delivered by Kongsberg Maritime including the fully electric container feeder, YARA Birkeland. It has been developed by the Kongsberg Maritime in conjunction with FFI, the Norwegian Defence Research Establishment and builds on a history of collaborative development projects, including the HUGIN AUV System.In addition to the the autonomy controller solution, SEA-KIT will be equipped with Kongsberg Maritime’s Maritime Broadband Radio (MBR) for high bandwidth direct communication to

SeeByte Supports Unmanned Warrior Operators
in Unmanned Warrior. SeeByte was involved in four threads: Automatic Target Recognition (ATR), Command and Control, Collaborative Autonomy and Smart ROV Control. As part of this exercise, SeeByte supported the U.S. Navy Lab of Naval Surface Warfare Center Panama City Division (NSWC-PCD), Defence Research and Development Canada, an agency of the Canadian Department of National Defence, and the U.K.’s Defence Science and Technology Lab (Dstl). Together with ASV Global, Bluebear, and QinetiQ the team were successful in facilitating the collaboration of unmanned vehicles including
Australia, Japan Partner for Hydrodynamics Research
Australia and Japan have signed a cooperative research arrangement on marine hydrodynamics, the Chief Defence Scientist, Dr Alex Zelinsky, announced today. “This is the first joint defence research project to be conducted by our two countries,” Dr Zelinsky said. The collaborative research program will be undertaken by Australia’s Defence Science and Technology Group and Japan’s Acquisition, Technology and Logistics Agency. “This is an excellent start to our new relationship in defence science and technology cooperation,” Dr Zelinsky said.

Autonomy by (Software) Design
were used to enable multi-vehicle collaboration and inter-fleet communications, as well as autonomous solutions for Mine Counter Measures. These include integration of SeeByte’s Neptune software with SeaRobotics’ family of general purpose Unmanned Surface Vehicles (USV) as part of a Defence Research and Development Canada (DRDC) contract. This integration enabled the USV to act as a relay to an Unmanned Underwater Vehicle (UUV) squad. This is an important step needed in order to enable over-the-horizon UUV operations. The UK Royal Navy Maritime Autonomous Systems Trials Team (MASTT)
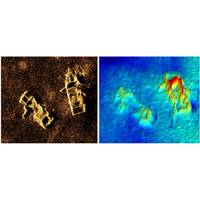
3D Image Fusion for Ultra High Resolution Seabed Surveys
and of frequency. SAS systems can achieve an image and bathymetry resolution of a few centimeters even in very deep waters. Figure 1 shows a simultaneously co-registered INSAS reflectivity image and 3D bathymetry of discarded automobiles in Halifax, Nova Scotia collected during sea trials with the Defence Research Development Canada. While SAS has been around for over a decade, military applications such as naval mine countermeasures have been its major development driver. However, SAS is a multi-use technology with great potential for offshore oil and gas surveying, hydrographic surveys, underwater






