Nortek Nucleus Supports Coral Reef Photogrammetry Project

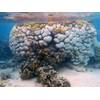
© Pim Bongaerts
In a collaboration between the Norwegian University of Science and Technology (NTNU), University of Sydney, California Academy of Sciences (CalAcademy), Oceanly, University of Western Australia, and University of Auckland, supported by Inkfish, the University of Sydney’s Seeker AUV, equipped with a Nortek Nucleus 1000, worked alongside divers to create a 3D map of a coral reef off the coast of Tonga.
Researchers from NTNU, the University of Sydney, and CalAcademy are working together to investigate how mesophotic reefs (low-light coral reefs in middle-depth waters) support the genetic diversity of corals which are increasingly threatened by climate change.
“Shallow reefs are more susceptible to climate change,” explains Dr. Jackson Shields, Research Fellow at the University of Sydney’s Australian Centre for Robotics (ACFR). “There are theories deeper reefs can act as refuges for these corals. When shallow reefs die out, they can be reseeded with corals from deeper ecosystems.”
As part of the Inkfish Coastal Seas expedition, the research team traveled to Tonga in the fall of 2024 to conduct a photogrammetry assessment of reefs in the Hapai area essentially creating a 3-dimensional map of the reefs which will be used to geo-reference their collected coral samples.
However, mesophotic reefs are historically under-studied, in part because they are difficult to access by divers because of their deeper depths. Additionally, divers could only cover so much ground during a dive. The team therefore chose to use two Seeker AUVs developed by the ACFR, equipped with Nortek Nucleus 1000 navigation sensors, to aid with the collection of photogrammetry data.
The ACFR’s Seeker AUV is a lightweight AUV designed to be cost-efficient and easily deployable. It is equipped with an 8MP stereo camera, which it used to collect image surveys of reef slopes at depths of 5m to 75m.
The team used two of these Seeker AUVs, collecting data in a total area covering 8000 square meters over one to two days at each site, about 20 times what a diver could cover. The vehicles traveled at a consistent altitude of 2m above the reef while traveling along their tightly spaced “lawnmower” path, traversing over 8km with precise navigation.
While the AUVs gathered large-scale photogrammetry data, divers from CalAcademy took close-range photogrammetry plots and gathered coral samples from each area.
The Seeker AUVs used a combination of USBL and the Nucleus 1000 sensor for navigation. The Nucleus is designed for use on small AUVs like this one, and provides DVL information, has a designated altimeter beam, a pressure sensor and a pre-synchronized AHRS.
In this case, the ACFR team fuses the data streams from the Nucleus into their Kalman filter for vehicle navigation. This data, combined with data from the USBL, kept the vehicle on track while mapping the area.
Shields also says the Nucleus’ compact size and easy integration have been beneficial to the AUVs. Having a reliable navigation solution, even on such a compact vehicle, is crucial to the success of projects like these.
Mesophotic reefs support an abundance of species and are crucial ecosystems for reef resilience. According to Shields, the Inkfish Coastal Seas expedition aimed to characterize the physical environment, biodiversity and ecology of these mesophotic reefs and their influence on shallow reef systems.
Shields also says there is opportunity in the future for vehicles like these to continue researching ecosystems like these.
Continuing to explore and better understand important underwater ecosystems like these will rely on modern subsea technology, including easily deployable AUVs with reliable navigation sensors.