IQUA Robotics Successful Proves Use of AUV for Autonomous Ship Hull Inspection



-
 The SPARUS II AUV vehicle performing an inspection of a fishing boat (20m length) in the port of Sant Feliu
de Guíxols (Girona). © IQUA Robotics
The SPARUS II AUV vehicle performing an inspection of a fishing boat (20m length) in the port of Sant Feliu
de Guíxols (Girona). © IQUA Robotics
-
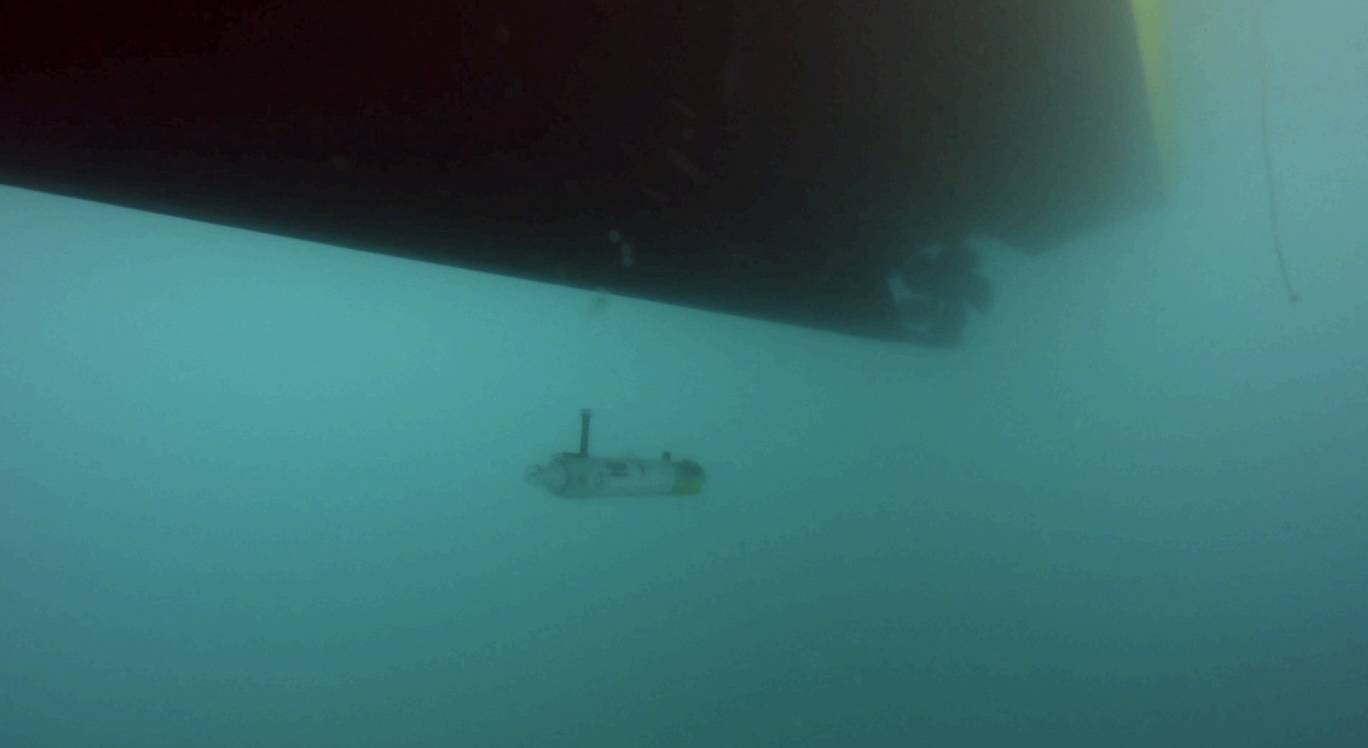
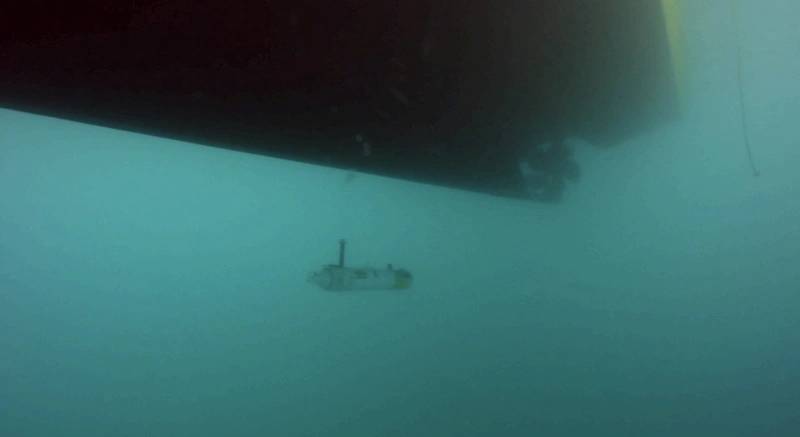 Underwater view of the robot following its trajectory below the vessel to collect hull information. © IQUA Robotics
Underwater view of the robot following its trajectory below the vessel to collect hull information. © IQUA Robotics
-
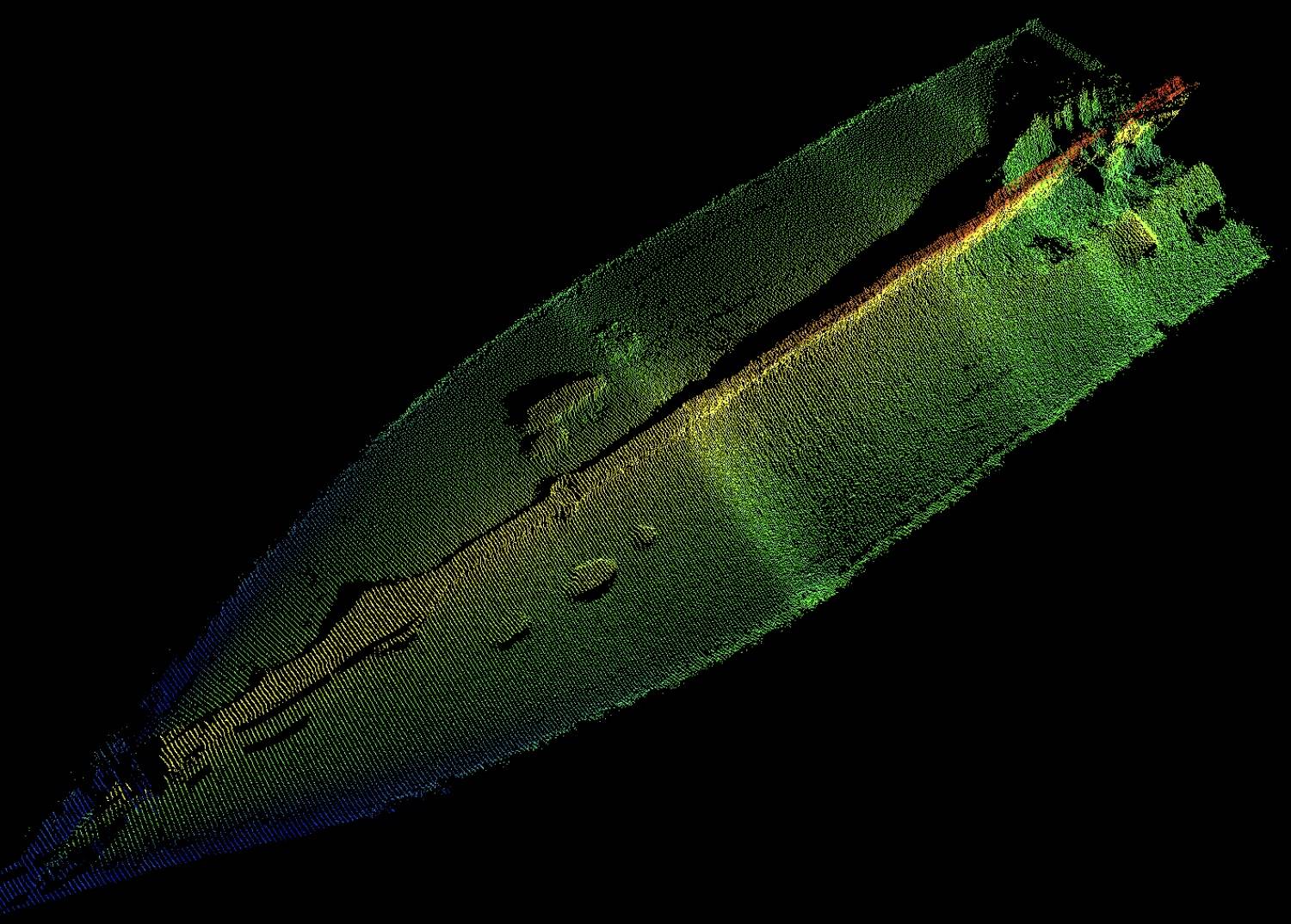
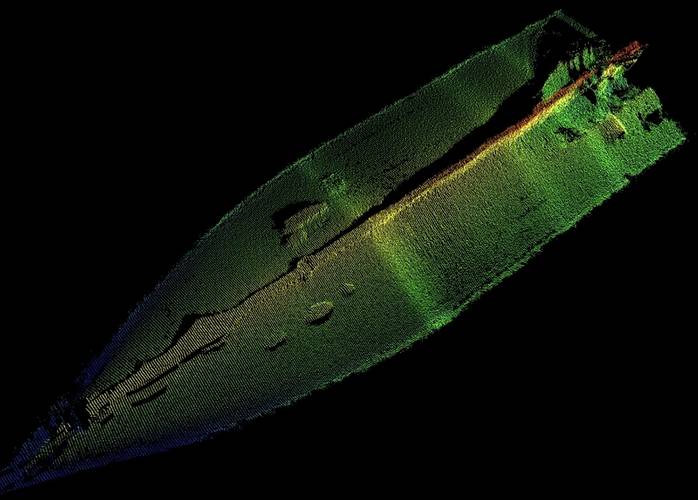 3D point cloud of the same vessel's hull obtained from multibeam sonar data. © IQUA Robotics
3D point cloud of the same vessel's hull obtained from multibeam sonar data. © IQUA Robotics

The ESCABVENTS project, developed by the company IQUA Robotics in collaboration with the Zamakona Yards shipyard, has successfully concluded its proof of concept tests, demonstrating the viability of using Autonomous Underwater Vehicles (AUVs) for naval inspection tasks.
This initiative, integrated into the Sail2future project, seeks to improve efficiency and safety in the preventive maintenance of vessels. The project has been funded by the European Union – NextGenerationEU through the PERTE NAVAL aid managed by the Spanish Ministry of Industry, Trade and Tourism, within the Recovery, Transformation and Resilience Plan.
The research has focused on overcoming the limitations of current methods, which usually rely on divers or tethered robots (ROVs). The use of an autonomous vehicle like the Sparus II AUV allows for systematic hull scanning without direct intervention from an operator in piloting.Throughout the project, several key technical capabilities have been validated:
- Adaptive tracking: The vehicle uses a multibeam sonar to detect the hull profile in real-time, adjusting its navigation to maintain a constant distance.
- Systematic navigation: The system executes adaptive "lawnmower" type trajectories that ensure complete and uniform coverage of the inspected area to collect hull images.
- Operational safety: Protocols have been implemented that allow the vehicle to perform automatic escape maneuvers towards free zones in case of experiencing a failure and ensure that the vehicle does not get trapped under the hull.
Results and practical applications
Experimental tests, carried out in collaboration with the Zamakona Yards shipyard and the staff of Reparaciones Navales Canarias, have been fundamental to validate the system in real port environments. These campaigns allowed the collection of multiple datasets on four vessels of different types, including fishing, research, and defense ships. The results show that it is possible to obtain 3D reconstructions with centimetric resolution, facilitating the identification of corrosion, marine fouling (biofouling), or paint damage.
Next steps toward specialization
Although the system has proven effective in the uniform sections of the hull, research has identified challenges in areas of complex geometry, such as the stern (propellers and rudders), where acoustic reflections complicate automatic tracking. Likewise, difficulties have been detected in taking images of the sides of the vessel, as the high light contrast of the surface causes underexposure in these areas. Therefore, future technical steps include:
- The design of new payloads with multi-camera systems and artificial lighting to improve visual quality.
- The exploration of 3D sonars to anticipate abrupt changes in the vessel's profile and improve the vehicle's control response.
In addition to industrial maintenance, this technology is expected to be applicable in port security for the inspection of critical infrastructure or the detection of threats and contraband adhered below the waterline.















