Introduction to Underwater Communications
Introduction to Underwater Communications
The father of underwater communication can be considered Leonardo da Vinci, who discovered the possibility of listening on a long submersed tube to detect the approach of a distant ship. But the development of underwater communication, in the modern sense of the words, began during World War II, for military purposes. Successful underwater communications can be realized in two ways: through wires (submarine cables or tethers) or wireless, using acoustic, laser or radio waves.
A typical submarine communications cable is made of a group of wires layered on the bottom of the sea or ocean which carry different types of telecommunications between users separated from large surfaces of water, most commonly in the connection of continents and adjacent islands. First submarine communication cables were used to carry telegraphy traffic; next generations have been developed for the telephonic traffic and for data communications.
All modern submarine cables now use optical fibers for the transport of digital payloads which carry telephone, Internet and private data traffic. The major part of subsea intercontinental information traffic is carried by the undersea cables, due to their great reliability. Such a cable is built with multiple paths in the event of a cable break. On the other hand, overseas satellite links can be disturbed by turbulences in the geomagnetic field.
The costs for these submarine communication cables which link continents and carry terabits of information per second are very high, so many governments consider them to be vital for their economies and created protection zones restricting the activities that could be potentially harmful for cables.
Antarctica is the only continent yet to be reached by a submarine telecommunications cable. All phone, video, and e-mail traffic must be relayed to the rest of the world via the satellite which is still quite unreliable. But the costs of submarine communication cables are extremely high, due to the extreme weather conditions on this continent.
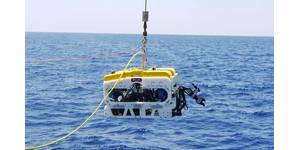
The wire links called tethers, between divers (either human or devices like ROVs or AOVs) and the control center on the surface, function on the same principle, only the distances covered are smaller. Underwater wireless communications are utilized in many activity domains: off shore oil and gas industry, collection of scientific data that are recorded at submersed stations, the monitoring of environmental pollution, communication between divers, fathering of data from submerged devices like RUVs or AUVs.
Underwater acoustic communication is rapidly growing due to research and engineering made possible by the extent of former military application into commercial fields.There are different means of wireless transmitting signals under water, not only the acoustic waves. The radio waves of extra low frequencies can propagate any distance in the good conductive salt water, but they require high power transmitters equipped with large antennae in order to cover long distances.
Clear sea water attenuates less the optical waves, like laser waves, but they are affected by dispersion. This is why the use of the narrow laser beams in the transmission of optical signals requires high precision in pointing. Until the laser technology will be adapted for practical use, the best solution for communicating under water, in applications where cable communication or tethering is not appropriate, remain the acoustic waves.
United States first developed an underwater telephone used to communicate with submarines on distances of several kilometers. A new generation of underwater communication systems began to evolve due to VLSI technology. Once compact DSPs having moderate power requirements became available, processing complex signal and data compression algorithms could be implemented for the first time at the submerged end of an underwater communication system.
The development of efficient communication systems increased the range of their applications but also the requirements on the system throughput and performances. To perform the maintenance of submerged platforms, pipelines or other facilities, divers were replaced with acoustically controlled robots. Acoustical communication systems are today able of facilitating high-quality video transmissions down from the bottom of the deepest ocean trenches up to the research vessels at the surface or to transmit telemetry data over long horizontal distances.
The majority of both military and commercial applications solicit today real time communications both in point to point links and in network configurations. The research aims the development of efficient signal processing algorithms, multiple access methods, encoding schemes, protocols for long propagation delays and the strict power requirements of the underwater environment.
Basically, a sonic underwater communication system is comprising an electronic waterproofed package including a battery source, the transducer (antenna), waterproofed earphone/s, microphone and a securing device (a belt buckle), a push-to-talk incorporated control or a Voice Operated transmitter (VOX) and an assembly to mount to a full face mask or to a mouth mask. There are some improvements available: Squelch control, VOX, multi channels, longer battery life, longer range, surface station.The squelch circuit allows the user to suppress marine back ground noise commonly found in salt waters and also manmade noise which will be found anywhere man is. The disadvantage of using squelch is that it not only suppresses noise but decreases range.
Voice Operated Transmission (VOX) is designed to allow hands free operation; when the circuit hears sound, it triggers the transmitter. As long as it hears sound it keeps the transmitter ON. When it does not hear anything for a set time, typically about 1 to 1 ½ seconds, it turns off the transmitter and cycles back to the receive mode. But divers make lots of noise in their mouth or full face mask when they off gasses and VOX circuit hears and triggers the transmitter. It is for this reason most good VOX designs have some sort of control over the sensitivity setting. Multi-channels: for the commercial and military diver teams that are operating in the same area alternate channels they can choose to communicate through are necessary.
Surface Station: In order to talk to free swimming Scuba divers using through-water communications, you must have a through- water device on the same frequency, be within range and have a transducer in the water. The user simple lowers the transducer into the water and all divers talking within range and on the same frequency will be heard.
The father of underwater communication can be considered Leonardo da Vinci, who discovered the possibility of listening on a long submersed tube to detect the approach of a distant ship. But the development of underwater communication, in the modern sense of the words, began during World War II, for military purposes. Successful underwater communications can be realized in two ways: through wires (submarine cables or tethers) or wireless, using acoustic, laser or radio waves.
A typical submarine communications cable is made of a group of wires layered on the bottom of the sea or ocean which carry different types of telecommunications between users separated from large surfaces of water, most commonly in the connection of continents and adjacent islands. First submarine communication cables were used to carry telegraphy traffic; next generations have been developed for the telephonic traffic and for data communications.
All modern submarine cables now use optical fibers for the transport of digital payloads which carry telephone, Internet and private data traffic. The major part of subsea intercontinental information traffic is carried by the undersea cables, due to their great reliability. Such a cable is built with multiple paths in the event of a cable break. On the other hand, overseas satellite links can be disturbed by turbulences in the geomagnetic field.
The costs for these submarine communication cables which link continents and carry terabits of information per second are very high, so many governments consider them to be vital for their economies and created protection zones restricting the activities that could be potentially harmful for cables.
Antarctica is the only continent yet to be reached by a submarine telecommunications cable. All phone, video, and e-mail traffic must be relayed to the rest of the world via the satellite which is still quite unreliable. But the costs of submarine communication cables are extremely high, due to the extreme weather conditions on this continent.
The wire links called tethers, between divers (either human or devices like ROVs or AOVs) and the control center on the surface, function on the same principle, only the distances covered are smaller. Underwater wireless communications are utilized in many activity domains: off shore oil and gas industry, collection of scientific data that are recorded at submersed stations, the monitoring of environmental pollution, communication between divers, fathering of data from submerged devices like RUVs or AUVs.
Underwater acoustic communication is rapidly growing due to research and engineering made possible by the extent of former military application into commercial fields.There are different means of wireless transmitting signals under water, not only the acoustic waves. The radio waves of extra low frequencies can propagate any distance in the good conductive salt water, but they require high power transmitters equipped with large antennae in order to cover long distances.
Clear sea water attenuates less the optical waves, like laser waves, but they are affected by dispersion. This is why the use of the narrow laser beams in the transmission of optical signals requires high precision in pointing. Until the laser technology will be adapted for practical use, the best solution for communicating under water, in applications where cable communication or tethering is not appropriate, remain the acoustic waves.
United States first developed an underwater telephone used to communicate with submarines on distances of several kilometers. A new generation of underwater communication systems began to evolve due to VLSI technology. Once compact DSPs having moderate power requirements became available, processing complex signal and data compression algorithms could be implemented for the first time at the submerged end of an underwater communication system.
The development of efficient communication systems increased the range of their applications but also the requirements on the system throughput and performances. To perform the maintenance of submerged platforms, pipelines or other facilities, divers were replaced with acoustically controlled robots. Acoustical communication systems are today able of facilitating high-quality video transmissions down from the bottom of the deepest ocean trenches up to the research vessels at the surface or to transmit telemetry data over long horizontal distances.
The majority of both military and commercial applications solicit today real time communications both in point to point links and in network configurations. The research aims the development of efficient signal processing algorithms, multiple access methods, encoding schemes, protocols for long propagation delays and the strict power requirements of the underwater environment.
Basically, a sonic underwater communication system is comprising an electronic waterproofed package including a battery source, the transducer (antenna), waterproofed earphone/s, microphone and a securing device (a belt buckle), a push-to-talk incorporated control or a Voice Operated transmitter (VOX) and an assembly to mount to a full face mask or to a mouth mask. There are some improvements available: Squelch control, VOX, multi channels, longer battery life, longer range, surface station.The squelch circuit allows the user to suppress marine back ground noise commonly found in salt waters and also manmade noise which will be found anywhere man is. The disadvantage of using squelch is that it not only suppresses noise but decreases range.
Voice Operated Transmission (VOX) is designed to allow hands free operation; when the circuit hears sound, it triggers the transmitter. As long as it hears sound it keeps the transmitter ON. When it does not hear anything for a set time, typically about 1 to 1 ½ seconds, it turns off the transmitter and cycles back to the receive mode. But divers make lots of noise in their mouth or full face mask when they off gasses and VOX circuit hears and triggers the transmitter. It is for this reason most good VOX designs have some sort of control over the sensitivity setting. Multi-channels: for the commercial and military diver teams that are operating in the same area alternate channels they can choose to communicate through are necessary.
Surface Station: In order to talk to free swimming Scuba divers using through-water communications, you must have a through- water device on the same frequency, be within range and have a transducer in the water. The user simple lowers the transducer into the water and all divers talking within range and on the same frequency will be heard.