
Lander Lab: Chilean Ocean Lander Data Acquisition and Control System

A hadal-class ocean lander, designed and built by the Universidad de Concepción (UdeC), Centro de Instrumentación Oceanográfica, is seen during buoyancy testing on the RV Kay-Kay in Dichato Bay, 38 kilometers north of the city of Concepción, in central Chile. The proximity and challenge of the Atacama Trench relentlessly draw UdeC engineers and scientists. Their ocean lander can downcast as a CTD-O in descent, remain in situ for extended periods on the trench floor, then upcast as a CTD-O/Rosett
Introduction
There are enormous technological challenges in accessing and sampling hadal depths, but the recent surge in the development of deep-ocean technologies ranging from ocean landers, remotely operated vehicles (ROVs), and human-occupied vehicles (HOVs) has allowed the oceanography of trenches to be addressed.
Ocean landers are a cost-effective class of autonomous unmanned underwater vehicle that possess a unique capacity for exceptionally quiet, extended stays on the seafloor, studying benthic communities and environments by in-situ sensing and sampling. Multiple landers can be used to survey large areas from a modest vessel using different search strategies.
Recent developments with ocean landers at the Universidad de Concepción in Chile have shown they are capable of collecting water samples at chosen depths, as well as downcast and upcast conductivity-temperature-depth plus dissolved-oxygen (CTD-O) profiles to hadal depths.
Ocean landers currently see limitations related to their data acquisition and control (DAC) systems. Most are controlled using acoustic systems operated from a surface vessel or pre-set countdown timers. In many applications, commercial sensors are often unnecessarily operated at their maximum sampling rates throughout the entire mission, depleting critical battery power.
Chilean marine researchers have derived a hybrid design for an autonomous DAC system that combines the capability to produce high resolution hydrographic profiles with a stationary bottom platform (moored mode), for observing diversity in benthic zones to hadal depths. The system integrates standard oceanographic instruments with energy-conserving strategies to obtain optimal performance within mission constraints. To achieve these objectives, the Chilean research team leveraged open-source hardware components, such as Arduino microcontrollers, expansion boards, and open software tools, significantly accelerating the development process.
Data Acquisition and Control (DAC) system
The design of the DAC system is based on the Atmega 2560, a microcontroller board with 54 digital input/output pins (of which 15 can be used as PWM outputs), 16 analog inputs, 4 UARTs (hardware serial ports), and a 16 MHz crystal oscillator. A compact version of the classic Arduino Mega, Mega2560-Core, provides a board that can run on 3.3V, drawing approximately 18 mA. The Mega2560-Core, along with commercial breakout boards and individual components, provide a robust and flexible platform for data acquisition and control. The Mega2560-Core can enter sleep mode with a current consumption of less than 0.18mA. A key strategy to conserving power is using the Mega2560-Core to switch the power-hungry CTD on and off, and adjust its sampling rate. The Mega2560-Core consumes only 1.7% of the power used by the CTD in the active mode. The battery pack consists of 12 D-cell alkaline batteries, (nominal 270 WH). An Adafruit DS3231, a precision real-time time clock (RTC), is used for timekeeping, allowing for the synchronization of low frequency sampling and building a log file for the system. This RTC is temperature compensated, offering high accuracy, with a typical drift of 1 min per year. The I2C interface module includes a coin cell, allowing the RTC to maintain data and time for at least two years without any external power. The RTC consumes less than 0.1 mA powered by the 3.3V power unit available in the system. Data is stored in a SanDisk Secure Digital Micro SD Card Industrial grade 16 GB microSD. As tested in this project, the SD Card requires less than 10 mA during writing and up to 100 mA in short periods when it is initialized.
 Wiring diagram of the main processor based on Atmega Mega2560-Core, and expansion boards. The system components have been selected for efficient energy consumption, from the microcontroller with an active mode consumption of 59 and 0.6 mW in sleep mode. (Image by Victor Villagrán, UdeC)
Wiring diagram of the main processor based on Atmega Mega2560-Core, and expansion boards. The system components have been selected for efficient energy consumption, from the microcontroller with an active mode consumption of 59 and 0.6 mW in sleep mode. (Image by Victor Villagrán, UdeC)
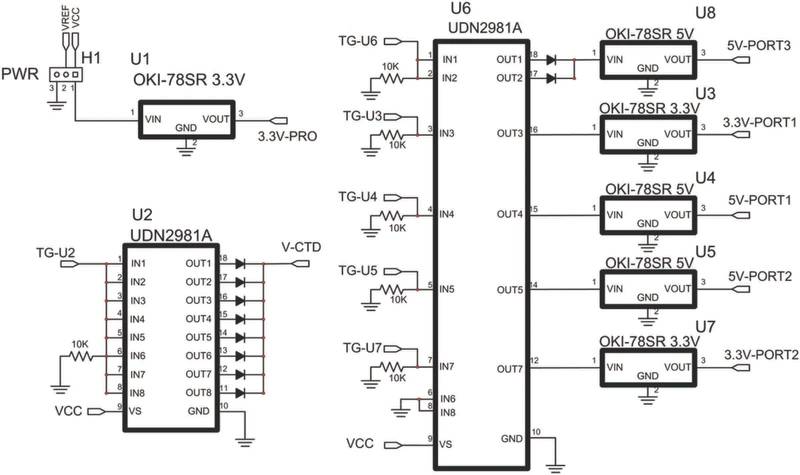
Electric schematic of the main power unit includes power drivers and voltage regulators to support the requirements of the system. Components, such as low quiescent current power drivers, enable the implementation of energy efficient consumption strategies by turning OFF subsystems that are not required during the moored mode. (Image by Victor Villagrán, UdeC)
A significant advantage of Mega2560-Core are the numerous serial hardware interfaces available. Each port is supported by an individual universal asynchronous receiver/transmitter (UART) circuitry, providing reliable communication with serial peripherals. As with most microcontrollers, the serial ports utilize TTL levels, 0–3.3V/5V. A SparkFun max3232 breakout board allows the conversion from TTL levels to the standard RS232, which is available on the interfaces of the CTD and the Oxygen sensor. The third serial port is intended to support communication with the host computer using either a Bluetooth modem or an external TTL/USB adapter. Thus, the user can configure the system from a Serial Terminal or a Graphical User Interface (GUI) that can be built in the future. Serial port 0 is reserved for accessing the IDE when updating the firmware.
Firmware Development
The firmware for this system provides a comprehensive solution for the high sampling rate required when the lander profiles the water column down and back, and the low sampling rate required when it reaches the seabed. As shown in the flowchart in Fig. 4, the user can enable a premonitoring cycle to verify the correct sampling of the sensors. To activate this function, the user toggles a reed switch using an external magnet. Premonitoring can be run for hours without power concerns because it performs low-frequency sampling and enters sleeping modes in between. When removing the magnet, the system took samples on FastCat to determine the beginning of the downcast, which occurred when the conductivity is greater than a user-defined threshold parameter. Similarly, the CTD has an internal conductivity threshold parameter that ensures that the pump is turned on only in saltwater.
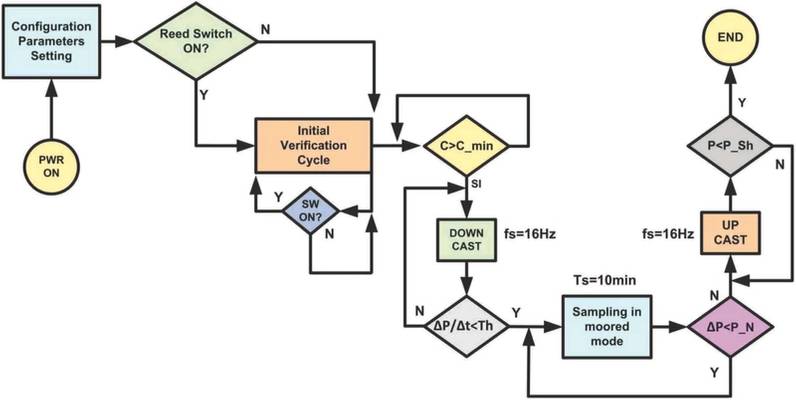 Simplified flowchart of the firmware for integrated operation of the lander. During the moored mode, the DAC increases the sampling period of the oceanographic instruments to 10 min. During this period, the system remains in sleep mode, only waking up every 1 min to measure the depth, without turning on the CTD pump. “C_min” is a threshold conductivity to start the downcast, “Th” is a bottom detection algorithm, “P_N” is Pmax +Pnoise control parameter, “P_Sh” is depth to finish upcast. (Image by Victor Villagrán, UdeC)
Simplified flowchart of the firmware for integrated operation of the lander. During the moored mode, the DAC increases the sampling period of the oceanographic instruments to 10 min. During this period, the system remains in sleep mode, only waking up every 1 min to measure the depth, without turning on the CTD pump. “C_min” is a threshold conductivity to start the downcast, “Th” is a bottom detection algorithm, “P_N” is Pmax +Pnoise control parameter, “P_Sh” is depth to finish upcast. (Image by Victor Villagrán, UdeC)
Bench Testing
Extensive lab tests were used to evaluate the system design and conduct simulations under controlled conditions. The tests were performed in the laboratory to verify general functioning and to determine whether the data was properly stored in the microSD card.
At Sea Deployment
The first Integrated Deep-Ocean Observation System (IDOOS II) cruise was conducted from 27 September to 9 October 2023 in the Antofagasta region onboard the RV Abate Molina. The main goal of this expedition was to deploy the first deep-ocean observation system to study the physical, geological, and biological structures of the area. In addition, the new lander was launched to confirm improvements in electronic systems and structural design, gather data on the physical variability of the water column, and obtain biological samples from the Atacama Trench floor.
Throughout this first research cruise, only one lander launch was executed, as the majority of tasks focused on deploying two deepwater moorings in and near the trench. Nonetheless, the launch proved successful, concluding in the retrieval of the vehicle along with data and samples for subsequent analysis. The ocean lander was successfully deployed again on two later missions 1) October 2 to October 18, 2024, RV Cabo de Horno (2 lander missions), and 3) January 17 to January 25, 2025, RV Cabo de Horno (4 lander missions).
The primary burnwire ballast release was activated at 18h by the DAC. For redundancy, the burnwire could also have been activated by the EdgeTech BART acoustic system, Burn Wire 1 code. The DAC is used in this configuration as a countdown timer release. Bottle B1 was closed on ascent by the DAC using a burn wire programmed to snap at 7100m as determined by the upcast CTD data. Bottle B2 burnwire was closed on ascent by the EdgeTech acoustic system, Burn Wire 2 code. The drop arm was deployed by a burnwire triggered when the DAC detected arrival on the seabed, indicated by static pressure measured over a defined time interval. After the vehicle is retrieved, it is possible to verify the closure of bottles, deployment of the drop arm, capture of marine organisms, and integrity of the data files.
The profiles obtained by the lander revealed significant hydrographic variability in the water column in both the descending and ascending casts. Among the measured parameters, temperature showed the greatest variability, decreasing from 17°C to 2.3°C down to 2500m depth (where the thermocline was located), stabilizing at approximately 2°C from that depth to 6000m, followed by a slight increase due to the adiabatic effect. Maximum variability of dissolved oxygen was observed at a depth of 500m (oxycline), ranging between 300 and 0μM, with a slight increase to 125μM at 700m, a gradual rise to 160μMat at 4000m, and a slight decrease at greater depths.
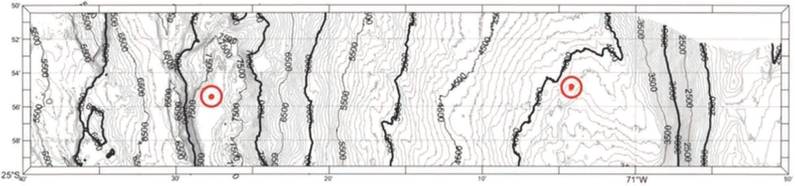 Bathymetry showing the oceanographic mooring sites of IDOOS. The red point on the left marks the deep mooring location at the indicated latitude and longitude, near which lander deployments are regularly conducted. (Illustration by by Óscar Pizarro, UdeC)
Bathymetry showing the oceanographic mooring sites of IDOOS. The red point on the left marks the deep mooring location at the indicated latitude and longitude, near which lander deployments are regularly conducted. (Illustration by by Óscar Pizarro, UdeC)
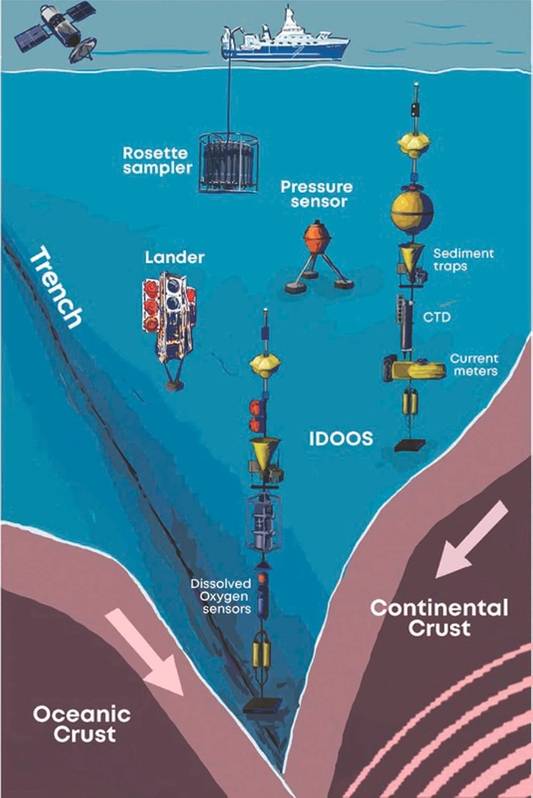 Schematic diagram illustrating the elements of the Integrated Deep-Ocean Observing System, IDOOS (Illustration by Felipe Gamonal, UdeC).
Schematic diagram illustrating the elements of the Integrated Deep-Ocean Observing System, IDOOS (Illustration by Felipe Gamonal, UdeC). Trap attached to the ocean lander with amphipods collected during the first deployment into the Atacama Trench. (b) Various shades and sizes of Eurythenes atacamensis, (Photo by Matías Pizarro, UdeC)
Trap attached to the ocean lander with amphipods collected during the first deployment into the Atacama Trench. (b) Various shades and sizes of Eurythenes atacamensis, (Photo by Matías Pizarro, UdeC)
Simultaneously, biodiversity studies in the water column have provided key insights into the distribution and structure of metazoans (multicellular animals) at depths greater than 3000m, which are inaccessible using conventional sampling nets. These advances were achieved through environmental DNA (eDNA) analysis of samples collected using Niskin bottles, enabling detailed profiles of species richness and relative abundance. The results suggest that the ultradeep ocean harbors surprising biological richness, often surpassing that observed in the surface layers.
One of the main remaining challenges during lander deployment is preserving viable samples for metabolic analyses, which are essential for studying the chemical and biological processes that enable organisms to adapt to their environment. Genetic material, particularly RNA, is highly susceptible to degradation due to changes in pressure, temperature, and time required to recover the samples. This underscores the urgency of developing in-situ preservation techniques that minimize the alteration of genetic material.
Despite these limitations, valuable results have been obtained through adapted protocols for analyzing degraded material. Although these methodologies provide limited coverage of metabolic pathways, they highlight the need for innovation in more robust technologies. Such advancements will be fundamental for exploring the adaptations that sustain life in hadal ecosystems, offering new perspectives on the evolutionary processes in these extreme environments.
Conclusions and Future Opportunities
This article presents an integrated observation system that enables the physical and biogeochemical study of the deep ocean. The lander’s successful mission in the Atacama Trench demonstrates the broad potential of this platform to contribute to the characterization of unexplored regions of the sea. The data acquisition system allows oceanographic instruments to be adaptively configured in real time, making them more efficient in their use by introducing profiling and moored modes. The system controls tasks involving mechanical actuation and offers different activation methods based on either the vehicle’s depth or time interval relative to its arrival at the seafloor. The achievements obtained with the lander in the Atacama Trench have been extraordinary, excelling both in the discovery of new species and the analysis of biodiversity and metabolism in this environment. These findings not only expand our understanding of biological diversity in the Atacama Trench but also shed light on the adaptation mechanisms of organisms in the hadal zone. The versatility of the DAC design allows for the development of new capabilities, such as the introduction of artificial vision techniques and electromechanical traps. Considering the limited availability of oceanographic instruments capable of operating in hadal conditions, the utilization of Aanderaa sensors for dissolved oxygen measurements stands out as a remarkable accomplishment. More work is needed on event triggers, including accelerometers, motion sensors, and pressure sensors. The EdgeTech BART acoustic release is capable of outputting 4 additional commands on JP3 AUX header that could enable expanded functions of the UdeC DAC board, including delaying the release sequence until commanded, enabling long-term deployments. The integration of the two appears straightforward, and would give topside researchers direct command and control of their seafloor scout in-situ. More sensor manufacturers should make external control of their devices possible. More work is needed on hadal depth actuators, including solenoids, flash wire releases, motors, and others. Further development of pressure-compensated LiPo batteries can provide more power safely for less offsetting buoyancy. Greater integration of recovery beacons inside the upper glass sphere will result in cost, complexity and weight savings, such as the Global Ocean Design Beacon Board that triggers on burnwire activation. Exploring hadal zones presents a vast field for technological advancement today, owing to both technical challenges and limited commercial incentives.
Acknowledgments
This story is based on the IEEE-OES paper “Versatile Data Acquisition and Control System for Free-Fall Underwater Vehicles: Exploring Hadal Waters”. The full IEEE text may be found at <https://ieeexplore.ieee.org/document/11015447>.
MTR acknowledges the full suite of authors of the IEEE-OES paper: Víctor Villagrán, José I. Cifuentes, Óscar Pizarro, Nadin Ramírez, Pablo Oliva, Kevin Hardy, Carolina E. González, and Osvaldo Ulloa.
About the authors
Víctor Villagrán is a Chief Engineer with the Department of Geophysics, and the Director of Technological Development at the Centro de Instrumentación Oceanográfica, Universidad de Concepción, Concepción, Chile (e-mail: “<[email protected]>”).
Osvaldo Ulloa is the Director and Principal Investigator of the Instituto Milenio de Oceanografía (IMO) and a Full Professor with the Department of Oceanography at Universidad de Concepción. His research focus is on biological oceanography where he has made significant contributions to the study of ecosystems in extreme marine environments. Ulloa is dedicated to fostering interdisciplinary and international collaboration, and the training of the next generations of marine scientists in Chile. Ulloa recently received the prestigious "Honor in Scientia Marina 2025” from the Chilean Society of Marine Sciences (SCHCM) in recognition of his outstanding work. (e-mail “<[email protected]>”)
“Lander Lab” is a hands-on column of Ocean Lander technologies, a unique class of unmanned undersea vehicles, and the people who make them. It is meant to serve the global ocean lander community in the manner of Make Magazine and other DIY communities.
Comments on this article, or suggestions for stories of interest to other Landereans are welcome. Other ocean lander teams are encouraged to write in about their work. MTR invites you to contact Kevin Hardy <[email protected]>.















