How Do You Build Tunnels and Bridges Underwater?
transform the underwater site into a dry one.For the first option, crews typically build parts of the structure on dry land and then sink them into place. For instance, the Ted Williams Tunnel in Boston was constructed in sections in a shipyard. Workers dredged the tunnel’s future path in Boston Harbor, cleaning mud and other refuse out of the way. Then they placed the sealed segments along the prepared trench. Once the segments were connected, they opened the ends of the segments to create one long, continuous tube. Finally, the tunnel was covered with soil and rock. Very little of the construction

Klein's Side Scan Sonar, Then and Now
with underwater things – underwater cameras, strobes, sonar, boomers and other devices – and was working on a device he called a “mud penetrator”. It was just a converted navy echosounder that he was pulsing to look through the sediment of the Charles River in Boston and Boston Harbor, and sort of by coincidence I came onto this scene. As a teenager I had been an electronics hobbyist. I had some experience working on these new devices called transistors, and I was able to improve the signals on Edgerton’s devices. At some point Edgerton turned his pinger, and
Boston Harbor Dredging Project to get Underway
The Massachusetts Port Authority (Massport) Board today voted to approve to execute a Project Partnering Agreement with the U.S. Army Corps of Engineers (ACOE) and MassDOT to start the Boston Harbor Dredging Project. A signed agreement allows the ACOE to bid contracts for construction on a Confined Aquatic Disposal cell (CAD cell), which is needed for the maintenance dredging of the Inner Harbor Main Ship Channel. Maintenance dredging will restore the inner harbor to 40 feet and is the first phase of the larger dredging project. Without maintenance dredging, the harbor will continue to silt

Herbert Joins Phoenix International
assisting The Bent Prop Project with WWII aircraft location in Palau. Before entering the private sector he served as a NOAA hydrographer aboard NOAA ships RUDE, RAINIER, and on two NOAA Navigation Response Teams based in Norfolk, VA and New York, NY. Survey areas included New York Harbor, Boston Harbor, Narragansett Bay, Chesapeake Bay, Puget Sound, and the coastal regions and fjords of southeast and southwest Alaska. Mr. Herbert worked in support of fleet logistics at NOAA’s Atlantic Marine Center and received the NOAA Office of Marine and Aviation Employee of the Year Award for his

Pe and Dive Teams Gear Up for Underwater Search
, major emergencies that happen during these events, as well as natural or man-made disasters. The division maintains a number of support units complete with specialized equipment and, since the city includes 41 square miles of water, much of it is designed for the marine environment. When it comes to Boston Harbor; as many criminals have discovered...what goes in, will come out, and it’s usually the Boston Police Department bringing the evidence to the surface. To assist in these operations the division has acquired JW Fishers SeaLion-2 ROV. The highly maneuverable remote controlled underwater
Exceptional Imagery via Bluefin Robotics AUV & Sonardyne Solstice
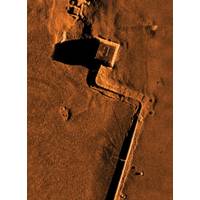
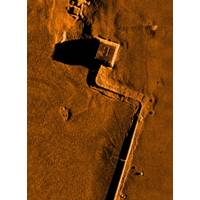
;s cover and to the left. The most recent trials of the Bluefin-12 AUV with integrated Solstice were conducted from Bluefin Robotics’ headquarters in Quincy, Massachusetts, where the AUV was deployed from Bluefin’s vessel, the R/V Resolution, to perform short missions around the Boston Harbor area in approximately 15m of water. Each mission consisted of legs of 500m, during which the AUV flew in a pattern commonly known as ‘mowing the lawn.’ “We are pleased with how quickly we were able to integrate the sonar and collect high-quality data,” said Will
Exceptional Imagery for Bluefin with Sonardyne Solstice
from conventional sonar. The most recent trials of the Bluefin-12 AUV with integrated Solstice were conducted from Bluefin Robotics’ headquarters in Quincy, Massachusetts, where the AUV was deployed from Bluefin’s vessel, the R/V Resolution, to perform short missions around the Boston Harbor area in approximately 15 meters of water. Each mission consisted of legs of 500 meters, during which the AUV flew in a pattern commonly known as ‘mowing the lawn.’ This is where the vehicle makes a pass over one area and then comes right back alongside it, running in parallel lines

Protecting Migrating Whale Sharks off Mexican Coast
come for a chance to participate in an ecotourism adventure, by swimming along side and getting close to the largest fish in the ocean and threatened species, the whale shark. “We are not looking to do anything radical. In 2007, NOAA and U.S. Coast Guard shifted ship traffic lanes in Boston Harbor to reduce the risk of collisions between large ships and whale sharks,” said Biól. Rafael de la Parra Venegas, Executive Director, Ch’ooj Ajauil AC (Blue Realm). “We want to do the same – adjust the ship traffic lanes further away from these areas, to improve safety

Bluefin Completes DARPA UUV Deep Testing
Program. DSOP is part of DARPA's Distributed Agile Submarine Hunting program (DASH), which aims to develop affordable distributed technology to address Anti-Submarine Warfare (ASW) surveillance needs over large, operationally relevant areas. In February, Bluefin mobilized a Boston Harbor Cruises' vessel, the Scarlett Isabella, at their dock in Quincy, Massachusetts and transited for over 48 hours towards the testing site. While severe weather brought on by Storm Q forced the team to adjust logistics plans, they were able to successfully conduct six days of operational testing