Remote Imaging in Underwater Environments
Underwater instruments are used for remote sensing, because the earth is an aquatic planet and as much as 80% of its surface is covered by water. Moreover, there is a strong interest in knowing what lies in underwater. Underwater remote imaging is considered an especially challenging area and it requires very specialized equipment and techniques to be successful.
Remote imaging has a variety of underwater applications such as: aquaculture and fishery operations, homeland and port security operations, forensics and crime scene investigation, search and rescue missions, recreational yachting, sport fishing , underwater marine life observation, shipwreck and treasure exploration, science, research and marine habitat mapping, inland dam inspection, offshore oil and gas pipelines and facilities observation, and numerous other underwater observation applications. Harbor security and ship inspections are more efficient with available attachments like scanning and imaging sonar. Deep sea wrecks are easily located, filmed, and explored using positioning systems and manipulators.
To gather information from above the water surface one has two choices: to use a diver or remote imaging underwater equipment. The diver can provide more detailed inspection, but he cannot work under a specific depth or in waters with very low visibility. The risk to human life is also to be considered. A remote device can collect data in various situations, like great depth, unlighted areas, harmful environments or restrained spaces. There are cases when a divers’ inspection is completed through using a remotely controlled underwater video system that can either directly send the information to a surface dive team or register it to be later analyzed.
Imaging means the representation of an objects’ outwards form, most commonly through visual images. But we can recreate the image of an object utilizing other methods. Visual images are formed by our brain which composes them from the information gathered by our eyes. Visual images formation utilizes light rays. But we can also use other types of rays or waves to gather information about a specific item and its form, and then we can transpose the information in visual like images. From this started the use of acoustic waves, X rays, thermal rays or radar waves in imaging.
The water environment presents specific features influencing the use of different types of rays or waves; do to its density, most of the energy of those rays dissipates in a short distance, exception making the acoustic waves which spread on long and very long distances. Even visual images are hard to take, because visibility nears to zero below 100 m depth, and video cameras cannot be used without a source of light.
Technology used in remote imaging undersea – side-scan sonar
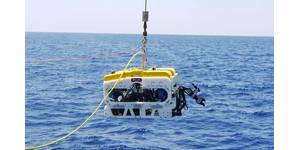
The most advanced type of sonar system is the side-scan sonar. The transducer is the technical device of the sonar that produces and projects sound pulses or beams, and directs them in an angle which is perpendicular on the path of the ship carrying it. Transducers also receive the reflected sounds and transmit the data collected to the calculator on board of the ship. Using performing soft based on sophisticated algorithms, the gathered data are converted in images of the objects encountered by the sound beams, called sonograms, including the image of the bottom of the ocean. There are more such devices linked in an array which is towed by the research vessel. The directions of the sound pulses emitted by the transducers cross in very sharp angles, so the images result from the “shadow arrangement” of reflected beams. The sound pulses are emitted in a large range of frequencies, from 100 kHz to 500k Hz. To obtain fine resolution they use higher frequencies, but this restrains the range of data collecting. High resolution images are provided by the high-frequency sonar with les than 100 m ranges. Lower resolution images are furnished by the lower-frequency systems, covering many miles. Improvements in side-scan imaging move forward continuously so it remains one of the most utilized tools for underwater imaging. The tow-fish with the side-scan sonar can be towed on deep or shallow waters, but the system can also be carried by ROTVs (Remotely Operated Towed Vehicles), ROVs (Remotely Operated Vehicles) or AUVs (Autonomous Underwater Vehicles). The Remotely Operated Vehicle (ROV) is an underwater device built to operate under the water, collecting information and performing other tasks like collecting samples. It is connected to the operator by a group of cables called tether that transmit electrical power, video and data signals. ROVs are usually equipped with video cameras and lights, sonar, instruments to measure pressure, temperature and other parameters of the environment. They can also be equipped with other specific devices and tools in order to accomplish the designated tasks. The greatest number of ROVs are utilized by the gas and oil industry. They are also used for military applications, scientific research or marine salvage operations of downed planes or sunken ships. The autonomous underwater vehicle (AUV) can be used for industrial applications such as hull and dam inspection, and is independent enough to require a minimum of human control. Usually, the remote operated vehicles (ROVs) are used for grunt work – they are connected to a ship on the surface by a tether, where a human operator controls them. The more technologically advanced AUVs tend to be used more for well-funded research, but one of the keys to creating “blue collar” AUVs is to overhaul the ways that they see, hear and think. They are smaller and tougher than their predecessors, and can be used in pretty much any underwater setting.
The AUV is able to see even in turbid water, thanks to a laser remote imaging system. An onboard camera emits laser pulses, which are reflected by underwater objects. As the camera receives and processes these waves of reflected laser waves, it will build up a picture of its surroundings. Hearing, so to speak, is accomplished via high-frequency sound waves. As with the laser pulses, these ultrasound waves will bounce off of objects and be registered by a sensor, allowing the AUV to inspect those objects. This is a step up from the sonar technology that similar vehicles currently use.
A control program keeps the AUV on course and out of harm’s way, even allowing for underwater currents. Its pressure-tolerant electronics are encapsulated in silicone, as are the vehicle’s lithium batteries. The program also features an energy management system, which will conserve power and save data in the event of an outage. Of course, the human supervisor can anytime regain the control or change the AUV’s program.
Remote imaging has a variety of underwater applications such as: aquaculture and fishery operations, homeland and port security operations, forensics and crime scene investigation, search and rescue missions, recreational yachting, sport fishing , underwater marine life observation, shipwreck and treasure exploration, science, research and marine habitat mapping, inland dam inspection, offshore oil and gas pipelines and facilities observation, and numerous other underwater observation applications. Harbor security and ship inspections are more efficient with available attachments like scanning and imaging sonar. Deep sea wrecks are easily located, filmed, and explored using positioning systems and manipulators.
To gather information from above the water surface one has two choices: to use a diver or remote imaging underwater equipment. The diver can provide more detailed inspection, but he cannot work under a specific depth or in waters with very low visibility. The risk to human life is also to be considered. A remote device can collect data in various situations, like great depth, unlighted areas, harmful environments or restrained spaces. There are cases when a divers’ inspection is completed through using a remotely controlled underwater video system that can either directly send the information to a surface dive team or register it to be later analyzed.
Imaging means the representation of an objects’ outwards form, most commonly through visual images. But we can recreate the image of an object utilizing other methods. Visual images are formed by our brain which composes them from the information gathered by our eyes. Visual images formation utilizes light rays. But we can also use other types of rays or waves to gather information about a specific item and its form, and then we can transpose the information in visual like images. From this started the use of acoustic waves, X rays, thermal rays or radar waves in imaging.
The water environment presents specific features influencing the use of different types of rays or waves; do to its density, most of the energy of those rays dissipates in a short distance, exception making the acoustic waves which spread on long and very long distances. Even visual images are hard to take, because visibility nears to zero below 100 m depth, and video cameras cannot be used without a source of light.
Technology used in remote imaging undersea – side-scan sonar
The most advanced type of sonar system is the side-scan sonar. The transducer is the technical device of the sonar that produces and projects sound pulses or beams, and directs them in an angle which is perpendicular on the path of the ship carrying it. Transducers also receive the reflected sounds and transmit the data collected to the calculator on board of the ship. Using performing soft based on sophisticated algorithms, the gathered data are converted in images of the objects encountered by the sound beams, called sonograms, including the image of the bottom of the ocean. There are more such devices linked in an array which is towed by the research vessel. The directions of the sound pulses emitted by the transducers cross in very sharp angles, so the images result from the “shadow arrangement” of reflected beams. The sound pulses are emitted in a large range of frequencies, from 100 kHz to 500k Hz. To obtain fine resolution they use higher frequencies, but this restrains the range of data collecting. High resolution images are provided by the high-frequency sonar with les than 100 m ranges. Lower resolution images are furnished by the lower-frequency systems, covering many miles. Improvements in side-scan imaging move forward continuously so it remains one of the most utilized tools for underwater imaging. The tow-fish with the side-scan sonar can be towed on deep or shallow waters, but the system can also be carried by ROTVs (Remotely Operated Towed Vehicles), ROVs (Remotely Operated Vehicles) or AUVs (Autonomous Underwater Vehicles). The Remotely Operated Vehicle (ROV) is an underwater device built to operate under the water, collecting information and performing other tasks like collecting samples. It is connected to the operator by a group of cables called tether that transmit electrical power, video and data signals. ROVs are usually equipped with video cameras and lights, sonar, instruments to measure pressure, temperature and other parameters of the environment. They can also be equipped with other specific devices and tools in order to accomplish the designated tasks. The greatest number of ROVs are utilized by the gas and oil industry. They are also used for military applications, scientific research or marine salvage operations of downed planes or sunken ships. The autonomous underwater vehicle (AUV) can be used for industrial applications such as hull and dam inspection, and is independent enough to require a minimum of human control. Usually, the remote operated vehicles (ROVs) are used for grunt work – they are connected to a ship on the surface by a tether, where a human operator controls them. The more technologically advanced AUVs tend to be used more for well-funded research, but one of the keys to creating “blue collar” AUVs is to overhaul the ways that they see, hear and think. They are smaller and tougher than their predecessors, and can be used in pretty much any underwater setting.
The AUV is able to see even in turbid water, thanks to a laser remote imaging system. An onboard camera emits laser pulses, which are reflected by underwater objects. As the camera receives and processes these waves of reflected laser waves, it will build up a picture of its surroundings. Hearing, so to speak, is accomplished via high-frequency sound waves. As with the laser pulses, these ultrasound waves will bounce off of objects and be registered by a sensor, allowing the AUV to inspect those objects. This is a step up from the sonar technology that similar vehicles currently use.
A control program keeps the AUV on course and out of harm’s way, even allowing for underwater currents. Its pressure-tolerant electronics are encapsulated in silicone, as are the vehicle’s lithium batteries. The program also features an energy management system, which will conserve power and save data in the event of an outage. Of course, the human supervisor can anytime regain the control or change the AUV’s program.