Project CETI Tracks Sperm Whale Conversations in Real Time
from and automatically communicates with the glider's navigation system to change directions and follow the whale," Gruber added.A glider is a small robot that slowly changes its buoyancy, becoming slightly heavier to sink and lighter to rise."You can think of it as a quiet, long-distance explorer, more like a soaring albatross than a motorized vehicle, steadily travelling through the ocean while listening and gathering information as it goes," Gruber said.Traditional tracking methods rely on suction tags that fall off after a few days or on stationary sensors that lose contact when

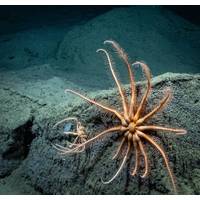
Mysterious "Golden Orb" Identified by NOAA Scientists
a depth of 3,250 meters (over 2 miles) in the Gulf of Alaska, is a remnant of the dead cells that formed at the base of a giant deep-sea anemone, Relicanthus daphneae. It was the part of the anemone that attached to the rock substrate.During NOAA Ocean Exploration expeditions on NOAA Ship Okeanos Explorer, it’s common for scientists to find organisms they don't immediately recognize. Most of the time, these mysteries are solved quickly as members of the scientific community chat and pool their knowledge. However, some discoveries turn into real puzzles — like in the case of the &ldquo
Ocean Discovery League Aims to Double Deep Seafloor Observations
; which revealed that only 0.001% of the deep seafloor has been visually observed despite covering more than half of the planet’s surface.“More than 99.999% of the deep seafloor has never been seen,” said Dr. Katy Croff Bell, President of Ocean Discovery League, National Geographic Explorer, and senior author of the study. “The Global Deep Sea Exploration Goals provide the first practical roadmap to change that. By coordinating exploration efforts across the global community and focusing on locations that represent the true diversity of the seafloor, we can dramatically accelerate

Scripps Awarded $15 Million for Environmental Surveys
in eDNA and Deep Argo programs, the award also provides early-stage support for an emerging technology that will enable the collection of this vital data. Funding from FFST will support the fabrication and deployment of a unique autonomous platform called RIFT-OX (Recoverable Ice Fracture Ocean eXplorer) designed to sample ocean water through full-thickness rifts in the Thwaites Glacier ice tongue. RIFT-OX is a floating platform that is lowered into rifts in the Thwaites ice shelf via helicopter, and then can lower its instrument package with an onboard winch to collect water samples and other

SeaBird Exploration Nets Contract Extension for Seismic Survey Vessel
Norwegian marine seismic survey services firm SeaBird Exploration, part of SED Energy Holdings, has secured a contract extension for its Fulmar Explorer seismic survey vessel.SeaBird Exploration has signed a three-month contract extension for ocean bottom node (OBN) source work for the vessel in the Western Hemisphere.This extension now commits the 2009-built vessel through mid-June 2026, maintaining the same commercial terms as the original agreement, the company said.The name of the client or the value of the contract extension has not been disclosed.

Monitoring the Restless Earth for the Next “Big One”
Vancouver Island in Canada to northern California.Between 2021 and 2025, USGS has installed four monitoring sites on the seabed off the US Pacific coast at the southernmost extent of this zone.They are part of a wider network along the Cascadia Subduction Zone where subduction involves three plates, the Explorer, Juan de Fuca and the Gorda, sliding beneath the North American Plate, creating the potential for magnitude 9+ earthquakes and large tsunamis.The USGS GNSS-A sites, each with three Fetch transponders, are on the southernmost Gorda plate where the uncertainty of the Gorda plate motion relative to

Teledyne Demonstrates Autonomous Systems for Anti-Submarine Warfare in the North Atlantic
an Anti-Submarine Warfare (ASW) demonstration in Icelandic waters using its autonomous underwater vehicles, including the Slocum Sentinel Glider with a 60-meter-long passive acoustic towed array, the Slocum G3 Glider with integrated Teledyne Benthos acoustic communications, and two Advanced Profiling Explorer (APEX) floats fitted with ambient noise Passive Acoustic MonitoringSeveral NATO members were in attendance to witness the trials which were conducted from the Teledyne Gavia facility located in Kópavogur, Iceland. With assistance from the Icelandic Coast Guard, the Teledyne team was

SeaBird Exploration Signs Contract Extension for Seismic Research Vessel
Norwegian marine seismic survey services firm Seabird Exploration, a wholly owned subsidiary of SED Energy Holdings, has signed a contract extension for OBN source work for its Eagle Explorer vessel.The three-month extension for the vessel is related to the work in the Western Hemisphere.The extension now commits the vessel through mid-May 2026, maintaining the same commercial terms as the original agreement.Eagle Explorer is a seismic research vessel built in 2009. It jointed Seabird Exploration’s fleet in 2018, and can operate worldwide as either a 3D, 2D or source vessel.

A Project Called Azorian: Doing the Impossible
eccentricities and speculative investments.Bottom photograph of manganese nodules in the central Pacific taken through a one-foot square wire grid during a seabed survey. Source: Authors photographThe Ship and the Capture VehicleThe surface ship was built by Global Marine and named the Hughes Glomar Explorer. She was designed by John Graham, Global’s chief naval architect, and later recognized as nothing short of an engineering marvel. The engineers did calculations on slide rules, plans were drafted using pencils, erasers, T-squares, triangles, and drafting paper to produce blueprints. Specifications