AUV Extravaganza: Tech Advances in Autonomous Underwater Vehicles






-
 Duane Fotheringham, president of the Unmanned Systems business group in HII’s Mission Technologies division with Remus 300. Photo Elaine Maslin
Duane Fotheringham, president of the Unmanned Systems business group in HII’s Mission Technologies division with Remus 300. Photo Elaine Maslin
-
 HUGIN Edge. Photo courtesy Kongsberg.
HUGIN Edge. Photo courtesy Kongsberg.
-
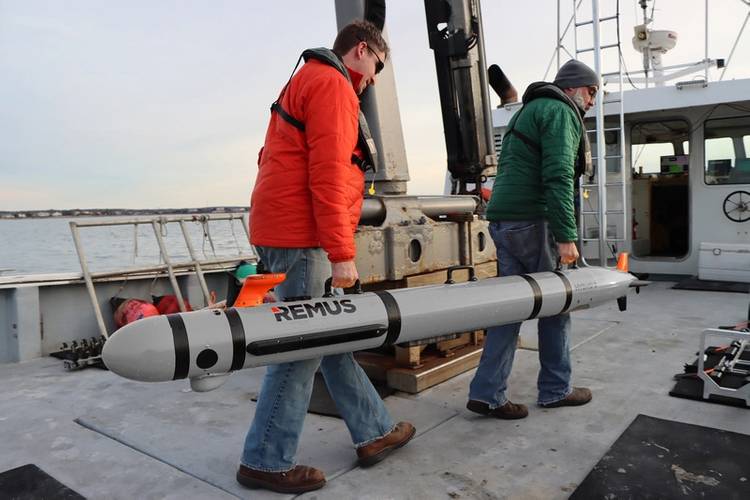 HII’s REMUS 300. Photo courtesy HII
HII’s REMUS 300. Photo courtesy HII
-
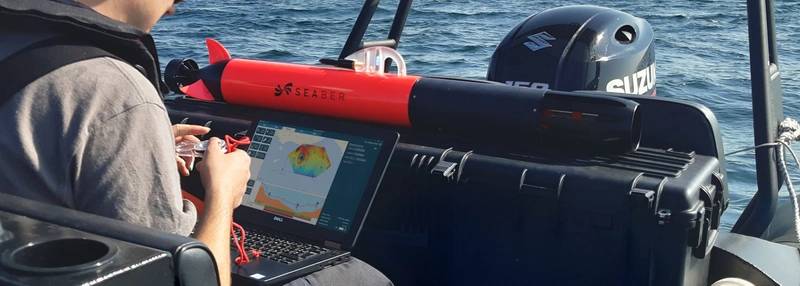 YUCO range of MicroAUVs. Photo courtesy Seaber
YUCO range of MicroAUVs. Photo courtesy Seaber
-
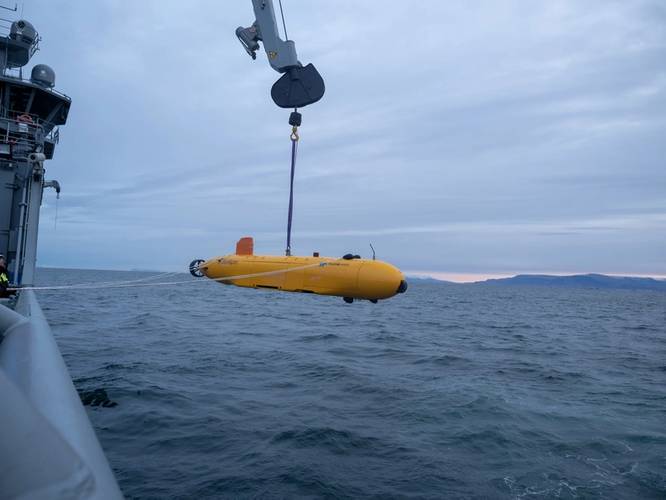 Teledyne Gavia’s “survey-grade” SeaRaptor. Photo courtesy Teledyne Gavia
Teledyne Gavia’s “survey-grade” SeaRaptor. Photo courtesy Teledyne Gavia
-
 Teledyne Gavia’s “survey-grade” SeaRaptor. Photo courtesy Teledyne Gavia
Teledyne Gavia’s “survey-grade” SeaRaptor. Photo courtesy Teledyne Gavia






Modularity, flexibility and intelligence are the bywords of some of the latest generations of autonomous underwater vehicles (AUVs) hitting the market, but not for all. Some are taking a more industrial mass production approach and/or going for a more fixed payload offering, to bring slimmer, lighter but still highly capable vehicles to the market. Elaine Maslin spoke to some of the manufacturers with their latest vehicles on show at this year’s Oceanology in London.
The range of colors – pink, grey, yellow, orange – not to mention shape and size of AUVs on show at this year’s Oceanology reflected more than just their different physical characteristics. For a market that’s still growing and evolving, vehicle manufacturers are continuously looking for their edge.
Kongsberg is looking for just that with the HUGIN Edge. The Norwegian company is hoping to re-open the 1,000 m-rated AUV market with its new “autonomous by design” HUGIN Edge. The 4m-long vehicle, weighing just 300 kg and designed to work at 2-5 knots, is targeting those who want to go deep for up to 24-hours, but don’t need to go 3,000m deep and don’t necessarily want to have to be AUV experts to run it.
It’s been designed to be operated with goal-based adaptive mission planning using AI and for ease of use from uncrewed surface vehicles (USVs), including autonomous launch and recovery and charging and data offload. Kongsberg hopes to deliver the first systems to customers by the end of 2023.
A nod to the past
The most distinctive feature is its design. This harks back to the first HUGIN design from the 1990s, which had a more Rankine-Carmichael hydrodynamic style, said Richard Mills, VP, Marine Robotics Sales, Kongsberg, while also drawing on work Kongsberg is doing on naval strike missiles.
The early vehicle was very low drag and “super high efficiency,” but that efficiency was lost as soon as holes were cut in it for sensors or modular sections, he says. The new design, which has also had input from industrial designers (in a first for Kongsberg on the HUGIN), to give it its modern look, goes back to that hydrodynamic focus. To do this, it’s had to go for a more fixed configuration.
“Unlike all our other products, this is a fixed configuration out of the factory, there are very few options on it,” said Mills. “This means we don’t have to have holes for bigger sonars, for example, which means we can integrate them and have them nice and flush.”
 Richard Mills, VP, Marine Robotics Sales, Kongsberg, with the HUGIN Edge. Photo: Elaine Maslin
Richard Mills, VP, Marine Robotics Sales, Kongsberg, with the HUGIN Edge. Photo: Elaine Maslin
Bringing back 1,000 m vehicles
A 1,000 m-rated vehicle is not new to Kongsberg. The first HUGINs were 1,000m-rated and it had one up until only a few years ago. But it was almost the same size as its deeper twin and weighed about a ton, so it needed the LARS and vessel support. It was also only 2% lower in price than a 3,000 m-rated version, so most would pay the extra 2% for that extra depth capability, he said.
However, many don’t go below that 1,000 m mark and when they polled customers and their sales team, they found that most needs, across defense and the commercial sphere, could be met with a common payload. That meant size, weight and cost could be reduced. The low-drag form factor, enabled by the fixed payload, has also meant power consumption has been cut by a third to a half.
Instead of the 120 kg EM240 multibeam echosounder, it’s getting a 700-1400 kHz, survey grade Kongsberg Mesotech M3. It’s getting a new Kongsberg synthetic aperture sonar, due to be released later this year and which Mills says “will outperform any sonar of a similar size on a similar vehicle” (but couldn’t say more, yet). It’ll also have a magnetometer and in the back of the vehicle there’s a swappable sub-bottom profiler or camera.
“Again, we found that people rarely need to do both (sub-bottom profiling and imagery) at the same time,” says Mills. “So to keep the size down, we designed this payload module that simply plugs into the same BUS that everything else is on.” This is also fixed, however, with a choice of EdgeTech or potentially GeoAcoustics GeoPulse Compact sub-bottom profiler and a CathX still image camera. The result is a price tag starting at just under $2 million, compared with $3 million and up for a 3,000m-rated HUGIN.
The HUGIN Edge is also getting a new Kongsberg forward looking sonar (FLS), which will also roll out across the HUGIN family of AUVs over time. This has wider horizontal coverage, out to 30 degrees, than the previous 7.5 degrees system used. This helps with contour smoothing and trajectory planning, including when traversing a slope or “crabbing”, to reduce the risk of heavy pitching that can cause gaps or smearing in data.
Goal-based mission planning
To make life easier for operators and reduce entry requirements, Kongsberg has also focused on goal-based mission planning. Instead of programming a mission, “we draw a box, select an activity and set the performance requirements for that activity”. Then the vehicle goes off and does it in the most efficient way it can. “You launch the vehicle and then in mission we have some performance metrics to compare what it’s achieving to the plan and it will then adjust accordingly,” says Mills. “It’s a smarter approach to survey so you can do things in a single dive that previously would have taken two or three dives and even with people in the water in the defense community,” says Mills.
 Stefan Reynisson, Teledyne Marine. Photo: Elaine Maslin
Stefan Reynisson, Teledyne Marine. Photo: Elaine Maslin
Teledyne Gavia’s SeaRaptor
More targeted towards the traditional HUGIN’s deepwater space is Teledyne Gavia’s “survey-grade” SeaRaptor. This max 4 knot, 3,000m or 6,000m depth capable vehicle, with 50-60-hour range at 3 knots, was first unveiled in 2019, when a first delivery was made, Teledyne said at the time, with longer duration options now available.
The flooded hull design vehicle is 6.8m-long and weighs 1.6 Mt. The modular design, with multiple pressure vessels for its control, navigation and electronics systems, etc., mean it’s flexible in terms of sensor and (Kraken) battery configuration (“field-swappable”). The payload included EdgeTech side scan sonar or Kraken 120 MinSAS synthetic aperture sonar, Teledyne Reson T-50 multibeam and Benthos Chirp 3 sub bottom profiler, as well as CathX high resolution camera and laser and Teledyne BlueViewM450 Obstacle avoidance sonar. It can also be air-shipped in its component parts. Navigation includes INS and DVL, with acoustic aiding from Teledyne and third-party, with tracking using an acoustic modem out to 10km, and USBL or LBL.
Stefan Reynisson, Teledyne Gavia, General Manager, Iceland, says modularity is important. “People don’t want to be stuck with a certain configuration for lifetime of the vehicle. Modularity means options in the first phase but also throughout life span. Vehicles that been out there 10-20 years can be upgraded to the latest standards. It helps one vehicle to add capability and modernise throughout its life.”
Doing more for longer
But increasing autonomy, endurance and capability, “staying out for longer and doing more”, is another key trend. “Customers want more reactive behaviour, more real-time processing, based on actual detection without human intervention,” says Reynisson. “By adding higher sensitivity sensors, you get better data quality, autonomous reactions will be more sophisticated, because they can rely on the detection probability using SAS and high frequency multi beam. Better resolution means better grounded decisions and making the vehicle react to those.”
Norway’s Argeo ordered two, 6,000m SeaRaptor’s last year, with the first delivered early March this year and the second due to be delivered at the end of April. Argeo is one of a number of companies that Reynisson notes is targeting a new business model; data as a service, alongside TerraDepth, which has Gavia’s in its fleet.
Looking further ahead, we are going to be seeing even fewer people in the field, says Reynisson. “Put the vehicle out in the harbour, send it out for 10-12 days to do a mission, have it pop up occasionally to say what it’s doing. There’s a lot more trust in autonomous and robustness in vehicle to do what it needs to do.
 HII’s REMUS 300. Photo courtesy HII
HII’s REMUS 300. Photo courtesy HII
Hydroid’s Remus 300
In the shallower water domain, but targeting similar modularity, flexibility and intelligence is HII’s REMUS 300. First unveiled by Hydroid in 2020 (before its acquisition by HII), with a prototype for the U.S. Navy, HII’s REMUS 300 is being delivered to customers, mostly in the military domain.
The 2.5m-long, 19cm-diameter dry hull-design vehicle is designed for work at up to 5 knots down to 300 m, with modular battery options allowing up to 10, 20 or 30 hours endurance. It has iXblue Phins C3 INS, Teledyne DVL and acoustic LBL aiding for navigation, plus side scan sonar, with a raft of optional payloads.
It has a common operating system for interoperability with all other REMUS vehicles and an open-architecture and modularity to enable easy integration of hardware and software, with optional development kits to enable third-party integration, said Duane Fotheringham, president of the Unmanned Systems business group in HII’s Mission Technologies division.
It has sealed replaceable, modular sections that can be changed in damp environments in the field. “We can pull it on deck and in 10 minutes put in a new battery pack and send it on another mission,” he says. The navigation and electronics systems, once in the same pressure housing, are now so compact they have been split into separate modules, increasing modularity and the open architecture, while a data distribution system means new payloads can communicate with each other via a single BUS.
Advanced autonomy
But, in addition to modularity and flexibility, it’s all about advanced autonomy. “We can now put a lot more processing power into the vehicles, which allows us to do edge processing, increasing the autonomous capabilities,” said Fotheringham. “Some of the things we are working on include health monitoring and how to understand, in mission, something is not working properly and then complete that mission using ML to solve those problems. If the side scan sonar fails, how to re-plan the mission to still get data. Automatic target detection and in mission sonar processing are the biggest changes we’re seeing. Longer missions without a person in the loop and increasing the odds of mission success.”
More broadly, HII’s direction of travel is about autonomy and multidomain operations. HII recently announced Odyssey, “a suite of advanced autonomy solutions that can turn any ship or vehicle in any domain into an intelligent, robotic platform”. This includes multi-vehicle collaborative autonomy, from remote control to fully autonomous capability, aligned with industry open architecture standards.
In-roads with national navies
Back to the REMUS 300; last year, the Royal New Zealand Navy was the first to place an international order, ordering four REMUS 300s. Late March, the vehicle was also selected as U.S. Navy’s next generation small UUV (SUUV) program of record (dubbed Lionfish), following a two-year rapid prototyping and refining of the REMUS 300 design.
Read more in MTR; The Remus legacy.
 Seaber
Seaber
Shallower and simpler by far is the YUCO range of Micro AUVs from French firm Seaber. Co-founder and CEO Vidal Teixero says a problem for those in ocean science has been that AUVs cost hundreds of thousands and they can be difficult to use – experts are needed “and that’s a real barrier”. So Seaber was launched in 2020 to address those needs in an industrial way, with offshore the shelf AUVs.
Seaber’s range is 12m diameter and 98cm to 123cm long, weighing up to 10.5kg and operable down to 300m water depth for 8-10 hours at 2-6 knots. They come in passive acoustic monitoring, CTD, AML multi-parameter and side scan variants and are designed to be used by anyone via a simple web user interface (SEAPLAN) and handheld UHF relocator (SEACOMM) with a ‘home’ button which triggers the vehicle to home in on that signal.
For navigation, with vehicles use Seaber’s INX (Intuitive Navigation eXperience) software that the company says works without needing externing sensors, but can be used with a DVL to more accurate positioning.
Side scan sonar for a song
YUCO-SCAN, the firm’s side scan sonar variant with Deepvision 680 kHz side scan sonar and a Water Linked DVL costs under $65,000, he said, “changing the game in side scan sonar. We are changing the rules.”
They’re not designed to need to work with acoustic positioning systems, which can add expense for institutes, says Teixero. Likewise, complex swarm operations can be avoided, simply by planning missions with the vehicles operating side by side, without any need to communicate, he says.
The company got an initial break via the Jerico program, to develop a simple AUV that meets science users’ needs. Since then its seen its AUVs deployed in all five oceans, says Teixero, mostly for ocean science or survey related operations.
One project, with Dalhousie University, saw the YUCO-PHYSICO AML multi-parameter probe model used in the St. Lawrence River estuary in Canada. The vehicle had an AML 3 sonde with fluorimeter, CTD and SVP and chased and ran a corkscrew or helix style pattern with a 30m radius (Seaber says 15m is possible) through a Rhodamine tracer cloud, enabling scientists to map concentrations through the water column (as a study to model the spread of pollutants in the water), where previously it only had a single stationary sensor for monitoring.