Testing of New Survey ROV Underway










-
 ROV Surveyor Interceptor
ROV Surveyor Interceptor
-
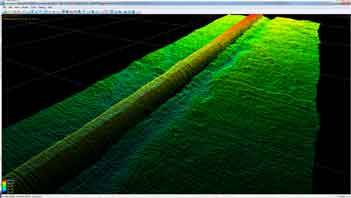
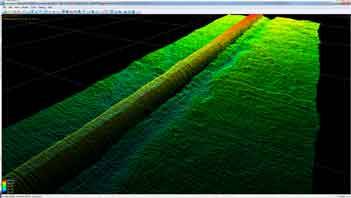 Multibeam pointcloud. Larger coverage, less resolution.
Multibeam pointcloud. Larger coverage, less resolution.
-
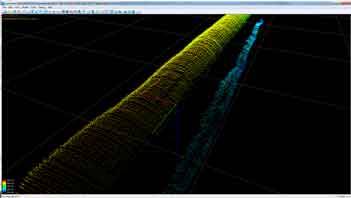
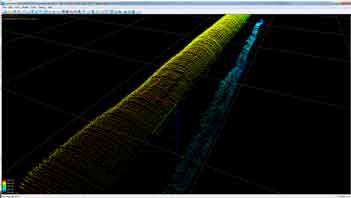 Laser pointcloud of 42” pipeline. Protection anode visible.
Laser pointcloud of 42” pipeline. Protection anode visible.
-
 Jostein Alendal, Reach Subsea
Jostein Alendal, Reach Subsea
-
 Ola Oskarsson, MMT
Ola Oskarsson, MMT
-
 Service stop
Service stop
-
 Service stop
Service stop
-
 Photo mosaic from Europipe 2
Photo mosaic from Europipe 2
-
 Still image from one of the photogrammetry cameras on board
Still image from one of the photogrammetry cameras on board
-
 Tense expectations at speed trials in the North Sea
Tense expectations at speed trials in the North Sea







MMT Sweden AB and Reach Subsea ASA have jointly invested in developing a new special underwater tool for seabed mapping and pipeline inspection with the Norwegian ROV manufacturer Kystdesign AS to serve a market for pipeline inspection and survey in the North Sea potentially worth 2 Billion NOK yearly.
According to the developers, the new remotely operated vehicle (ROV), called Surveyor Interceptor, has the innovative shape, powerful propulsion and advanced instrumentation performs the work an estimated four-eight times faster than existing Work Class ROVs, the umbilical and handling system yields up to six times better endurance than Autonomus Underwater Vehicles (AUV), and the automatic tracking and station holding system delivers stability.
“This machine has a punch I could never have dreamt of,” said Ola Oskarsson Founder MMT Sweden AB. “Together with the high precision instruments we can map at a quality not ever achieved before at reasonable cost.”
Gassco operates the Norwegian gas transportation system, embracing nearly 8,000 kilometers of large diameter pipelines. “We welcome this new technology and believe this will provide high quality in pipeline inspection and cost effective solutions to manage our assets,” said vice president in Gassco’s transport network department, Kristin Kinn Kaste.
The ROV is designed to carry survey instrumentation to perform Pipe line inspection, Route Surveys, Subsea Installation surveys and Environmental surveys down to 2,000 meters water depth. By combining a hydrodynamic favorable hull, thin umbilical and extreme propulsion with the latest state of the art sensors the vehicle is intended to deliver, never before ultra high-resolution data at a substantial lower cost per km.
The offshore testing is performed in the Haugesund area in Norway with economic support from Gassco AS. The ROV is onboard MV Edda Fonn and manned by Survey specialists from MMT Sweden and ROV specialists from Reach Subsea and Kystdesign.
The tests are covering launch and recovery, maneuvering, velocity, automatic pipe tracking and survey systems.
The ROV is equipped with an onboard inverted USBL from Sonardyne doubled by normal Kongsberg Hipap transponders to increase accuracy and ensure redundancy. Also the positioning is supported by two INS systems and a DVL. The test of station holding, line running and tracking have given outstanding results, the developers said, adding that the thruster management routines by Kystdesign have shown good reliability and precision.
The ROV propulsion has allowed the ROVto reach speeds well over six knots with auxiliary power intact. The driveline will be adjusted after finishing the trials to ensure stability and power management up to eight knots, reportedly a world record for a ROV.
The Multibeam system delivers 40 Hz ping up to 20 meters above seafloor. This together with the 800 beams ensures dense point coverage, even at high speed. To improve top of pipe accuracy and ovality measurements a 25 Hz triangulating laser system from Cathx Ocean covers the central 5 meters of the survey corridor delivering mm accuracy measurements.
Three photomosaicing cameras are synchronized with powerful strobe lights, taking 3d, Stereo and geocorrected photos of the pipe to produce high resolution GIS data of pipe status and possible third party intervention. The exposure time is very short, less than 5 milliseconds, to avoid motion blur and ensure crisp color seafloor imagery. This is also a very valuable tool for environmental investigations and geohabitat classification. The quality of these systems are approximately 8-10 times that of standard HD video with georeferenced frames, the ROV’s developers said. The systems detail and mosaicking capacity is improved over standard video.
Following some driveline adjustments and correction of time tagging issues, the Surveyor Interceptor will be ready for work from March 2015.














