HMI to Develop AI-powered Subsea Manipulator Hands
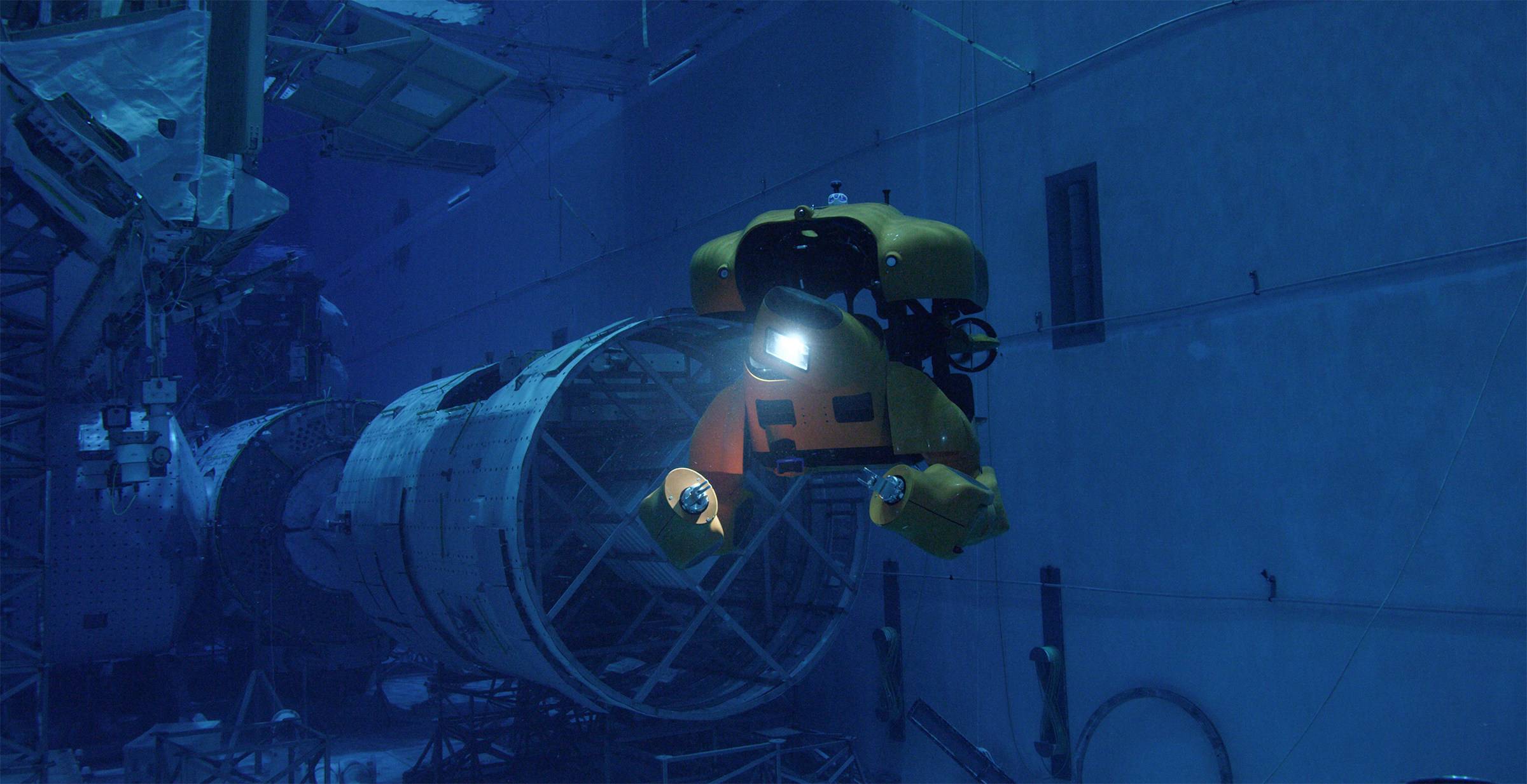
Aquanaut (Photo: Houston Mechatronics)
US-based subsea robotics firm Houston Mechatronics, Inc. (HMI) said it has set out to develop Artificial Intelligence (AI) powered robotic hands for subsea manipulators, under a recent award from the Office of Naval Research (ONR).
As technology matures, subsea systems such as autonomous underwater vehicles (AUV) and remotely operated underwater vehicles (ROV) are increasingly serving in more important roles for applications such as offshore oil and gas and underwater defense.
However, despite many technological advances over recent years, robots in the ocean typically do not have the manipulation dexterity of their land-based counterparts and therefore are not capable of approaching human-level performance, HMI said.
As part of an effort to close this technology gap, the team at HMI is developing and fielding highly dexterous robotic hands that use AI grasping behaviors which will be demonstrated with its shape-shifting transforming ROV/AUV robot Aquanaut.
"Our team excels at the rapid development, testing and deployment of subsea robotic technology, and we look forward to merging these capabilities with our knowledge base in humanoid robotics," said Nic Radford, CTO at Houston Mechatronics. "While our team was at NASA, our bio-mimetic designs worked well on Robonaut and Valkyrie and we look forward to demonstrating the value that dexterous end effectors integrated into capable manipulators will bring to the US Navy."
The hardware HMI is building will be coupled with AI powered software to enable higher performance.
"The field of robotics has always included a back and forth race between the hardware's ability and the underlying intelligent software which enables the intended function. However, for this effort, we will have to make considerable advancements on each front at the same time," explains Dr. JD Yamokoski, the Principal Investigator for this project.
HMI will test its innovations in robotic hands and dexterity on Aquanaut, a subsea robot that can change its morphology from a long range AUV to an un-tethered ROV platform suited for stable, seabed or water column manipulation tasks.