Javier Gilabert1, João Sousa2, Zoran Vukić3, Georgios Georgiou4, Laura de la Torre5, David McMyler6, Mark Inall6, Juhan Ernits8, Martin Ludvigsen9, Marc Carreras10, Gabriel Oliver11, Maria João Costa2, António Sérgio Ferreira2, Dan Hayes4, Nadir Kapetanović3, Francisco López-Castejón1, Milan Marković3, Miguel Massot11, Dula Nad3, Petter Norgren9, João Luís Pereira2, Núria Pujol12, Manuel António Ribeiro2, Carolina Rodríguez1, Paulo Sousa Dias2, Matt Toberman6, Dionisio Tudela1, Jüri Vain8, Emily Venables6.
1Universidad Politécnica de Cartagena (UPCT), 2University of Porto, Underwater Systems and Technology Laboratory (LSTS), 3University of Zagreb, Laboratory for Underwater Systems and Technologies (LABUST), 4University of Cyprus, Oceanography Centre, 5SASEMAR, Spanish Maritime Safety Agency, 6Irish Coast Guards, 7The Scottish Association for Marine Science - SAMS, 8Tallin University of Thechnology - TUT, 9University of Girona - UG, 10University of the Balearic Islands - UIB, 11Norges Teknisk-Naturvitenskatelige Universitet – NTNU, 12Marine Technology Unit CSIC.
Tracking in-water oil spills before reaching the surface by using new emerging robotic technologies is bridging the gap between existing traditional technologies (modelling and satellites) as decision support system for decision makers. Underwater oil plumes can come from bottom leaks or from surface patches forming subsurface plumes as recently been demonstrated. The distributed intelligence of these devices across the spill combined with hydrodynamic modelling is able to build up a highly accurate and dynamic image of the spill. This cooperating multivehicle robotic technology will allow a cheap, flexible, expandable, precise and rapid decision support system, improving the capacity of responding to these events.
Expanded Underwater Robotics ready for Oil Spills (e-URready4OS) is a European Union co-funded project (Directorate General – European Civil Protection and Humanitarian Aid Operations, DG-ECHO) aimed to join forces to make available a fleet of autonomous underwater vehicles (AUVs), unmanned aerial vehicles (UAVs) and unmanned surface vehicles (USVs) with operational capability to intervene against oil spills using new cooperative multivehicle robotic technologies (http://www.upct.es/urready4os).
This project is a natural extension of the URready4OS previous project in which the concept of a cooperative multivehicle fleet of robotic assets for in water oil detection and monitoring was proved.
Transforming this concept in an operative tool requires the improvement of the already existing system, the expansion of the fleet with new assets and the transfer of know-how to oil spill responders. The main goals and expected results of this project are:
- Expand the already existing URready4OS fleet (from 5 to 12 assets) capable of detecting oil in water.
- Provide training to new teams joining the fleet by performing exercises.
- Improve the current system with new software developments comprising a specific version of Neptus.
- Increasing the capability of the open source freely available MEDSLIK-II model for tracking small scale spills.
- Transfer the know-how to Maritime Safety Agencies (MSA) through short theoretical and practical courses.
Eleven institutions, universities and MSAs, from eight EU countries constitute the partnership: Universidad Politécnica de Cartagena - UPCT (Coordinator); Oceanographic Center - University of Cyprus – OC-UC, Universidade do Porto - UP, University of Zagreb - UZ, Sociedad Española de Salvamento y Seguridad Marítima - SASEMAR, Irish Coast Guard - ICG, The Scottish Association for Marine Science - SAMS, Tallin University of Thechnology - TUT, Universitat de Girona - UG, Universitat de les Illes Balears – UIB and the Norwegian University of Science and Technology – NTNU.
The e-URready4OS system is a fleet of multiple assets with different capabilities and characteristics comprising AUVs (Autonomous Underwater Vehicles), USVs (Unmanned Surface Vehicles) and UAVs (Unmanned Aerial Vehicles) from six different manufacturers coordinated by an open source command and control software (NEPTUS).
The AUVs fleet incorporate three LAUVs, two IVER2, two Sparus and one Remus 600. The Light Autonomous Underwater Vehicle (LAUV) is manufactured by OceanScan MST (a spin-off company from the Underwater Systems and Technology Laboratory – LSTS - University of Porto, http://www.oceanscan-mst.com/) targeted at innovative standalone or networked operations for cost-effective oceanographic, hydrographic and security and surveillance surveys. Based on a modular design, the platform is built to be robust and reliable. The IVER2 AUV is a well known small man-portable AUV manufactured by Ocean Server Technology, Inc (http://www.ocean-server.com/). With a proven track record over thousands of missions, it is ideal for imaging and environmental surveys, including research, development, and OEM based applications. The IVER2 design allows to integrate new sensors and capabilities. Sparus II AUV is a multipurpose lightweight hovering vehicle with mission-specific payload area manufactured by IQUA (a spin-off company from the University of Girona, http://iquarobotics.com/). The payload area can be customized by the end-user and with an open software architecture, based on ROS, for mission programming. Remus is manufactures by Hydroid (https://www.km.kongsberg.com/hydroid), a wholly owned subsidiary of Kongsberg Maritime leading manufacturer of advanced, innovative Autonomous Underwater Vehicles and marine robots for deep sea survey and mapping worldwide.
The surface component of the system is an Unmanned Surface Vehicle (USV), an autonomous overactuated surface platform (PlaDyPos) with 4 thrusters. This configuration enables motion in the horizontal plane under any orientation. The platform has been developed at the University of Zagreb Faculty of Electrical Engineering and Computing, Laboratory for Underwater Systems and Technologies (LABUST) for tracking of underwater objects communication router between the surface and the underwater navigation aid.
The air components are two SKYWALKER X8 (low-cost Components Off-The-Shelf) Unmanned Aerial Vehicle, modified at the LSTS, which allows for quickly deployable surveillance missions. It’s a hand launchable vehicle perfected for low altitude reconnaissance scenarios with live video feed used here as communication relay for AUVs when out of range.
Any new open asset can be added to the fleet just tuning communications and integration in the Command and Control Neptus software. Neptus is a Distributed Command and Control Infrastructure for the operation of all types of unmanned vehicles developed at the LSTS (University of Porto, https://lsts.fe.up.pt/toolchain/neptus). It supports the different phases of a typical mission life cycle: planning, simulation, execution and post-mission analysis and can be adapted by operators to fit mission-specific requirements and extended by developers through a comprehensive plug-in framework.
After the deployment of the vehicles in the water, a series of interactions between agents and operators take place. The positions of vehicles and recorded information by the AUVs are transmitted, either by air or underwater to the operators. AUVs can transmit this information directly to the ship (or land base station) underwater via acoustic modem. They can also transmit the data to the USV underwater by the same system. The USV sends afterwards the information by air, via Wi-Fi, either to the ship, if in the Wi-Fi range, or to the UAV. The UAV, can contact the USV aerial signal by low altitude flying over the surface vehicle. However, the AUVs can also store the information to be transmitted by air – via Wi-Fi – either to the USV, the UAV or the ship (if within the range) when onn the surface. The different types of communication and distance ranges provide the system with an extraordinary flexibility to design the operations.
Three training exercises have been performed. The first in 2014 in Split, with support of the Croatian Navy with three AUV, one USV and two UAVs operated under the same communication system. The second exercise was carried out on board of the SASEMAR (Spanish Maritime Safety Agency) vessel “Clara Campoamor”, multipurpose ocean going tugs and has 80 meters long, off Cartagena (SE Spain) in the Mediterranean Sea in 2015. The same team put into practice different strategies to locate and monitor a Rhodamine WT spill below 15 meters. In 2017 the third exercise took place on board of the same vessel and site with three new AUVs. Missions for six AUVs (different manufactures), one USV (PlaDyPos) and one UAVs (X8) were all designed by the chief pilot and uploaded to the vehicles. Several mission were designed to locate, characterize and monitor its direction, size and volume.
To determine spill direction from a known origin, the open source freely available model code MEDSLIK-II community model was used (http://medslikii.bo.ingv.it/). Within the perimeter traced by the model each AUV carried out coordinated missions in concentric circles at different depths thus intercepting the spill in its displacement direction. Once the spill origin is identified an imaginary line is traced along the plume and AUVs are programmed to perpendicularly cross this line in equidistant transects. Finally, missions were performed in straight lines crossing diagonally the plume from many different angles. Fluorometric sensors enabled the concentration measurements, while the diagonal transects provided the map of the spill extension.
New plug-ins for the command and control software NEPTUS were developed and installed in each vehicle allowing a better integration of the fleet. NEPTUS is able to design mission for any manufacturers vehicles, show their trajectories and recorded data in real-time as well as visualize maps of oil trajectories predicted by numerical models. On the other hand, the coordination of an expanded fleet working simultaneously with 6 AUV, 1 USV, 1 AUV and 2 auxiliary vessels has given satisfactory results. Exchange of information between NEPTUS and the bridge started to be explored during this exercise.
Next exercise is planned for 2018 on board of the Celtic Voyager vessel organized by The Irish Coast Guards.
In order to disseminate and transfer knowledge gained during this project, a short course is designed on oil spill tracking with autonomous agents (AUVs, UAVs, USVs) and their integration with other existing technologies is designed. A first version of this course was given to Civil Protection technical staff in Cyprus. The material developed for the courses, which will be improved during later events, is availability through the project website. This course will allow the final users to understand how, when and where to deploy a fleet of AUVs, the operational capabilities and limitations. Together with the project white paper, it will include guidelines, protocols and routines both for communications between vehicles and to ground/ship station as well as the procedures and requirements to join the fleet for any third party vehicles available. The document produced is focused on practical issues rather than theoretical, so it can be used for final users to decide when and how they should use these technologies, how to download and install the software, how to prepare new vehicles to join the fleet, which are the communications requirements both aerial and underwater, communications protocols to use, etc.
The integration of new teams is always a great technological and human challenge. This project aims to make accessible to oil spill responders a decentralized, flexible, expandable, easy to transport, low cost and open system. Our project is based on the idea that, the more trained agents involved, the more efficiently and available and useful and cheap the system will be.
The Author
Dr. Javier Gilabert is Professor at the Department of Chemical & Environmental Engineering - Technical University of Cartagena (UPCT) – Spain and PI of the Underwater Robotics Ready for Oil Spill project.








 Deployment of the Remus 600 to join the rest of the fleet - 5 AUVs and 1 USV - to begin an unmanned multi-vehicle collaborative mission. (Photo courtesy: Javier Gilabert)
Deployment of the Remus 600 to join the rest of the fleet - 5 AUVs and 1 USV - to begin an unmanned multi-vehicle collaborative mission. (Photo courtesy: Javier Gilabert)
 The unmanned vehicles fleet on “Clara Campoamor” vessel deck - 6 AUV; 1 USV, 1 UAV - in the June 2017 exercise in Cartagena. (Photo courtesy: Javier Gilabert)
The unmanned vehicles fleet on “Clara Campoamor” vessel deck - 6 AUV; 1 USV, 1 UAV - in the June 2017 exercise in Cartagena. (Photo courtesy: Javier Gilabert)
 Two AUVs and one USV in their parking positions ready to start a mission. (Photo courtesy: Javier Gilabert)
Two AUVs and one USV in their parking positions ready to start a mission. (Photo courtesy: Javier Gilabert)
 X8 UAV set to take off. (Photo courtesy: Javier Gilabert)
X8 UAV set to take off. (Photo courtesy: Javier Gilabert)
 Five AUVs ready for deployment. (Photo courtesy: Javier Gilabert)
Five AUVs ready for deployment. (Photo courtesy: Javier Gilabert)
 USV deployment with AUV in parking position. (Photo courtesy: Javier Gilabert)
USV deployment with AUV in parking position. (Photo courtesy: Javier Gilabert)
 X8 UAV taking off from deck. The net is prepared for landing. (Photo courtesy: Javier Gilabert)
X8 UAV taking off from deck. The net is prepared for landing. (Photo courtesy: Javier Gilabert)
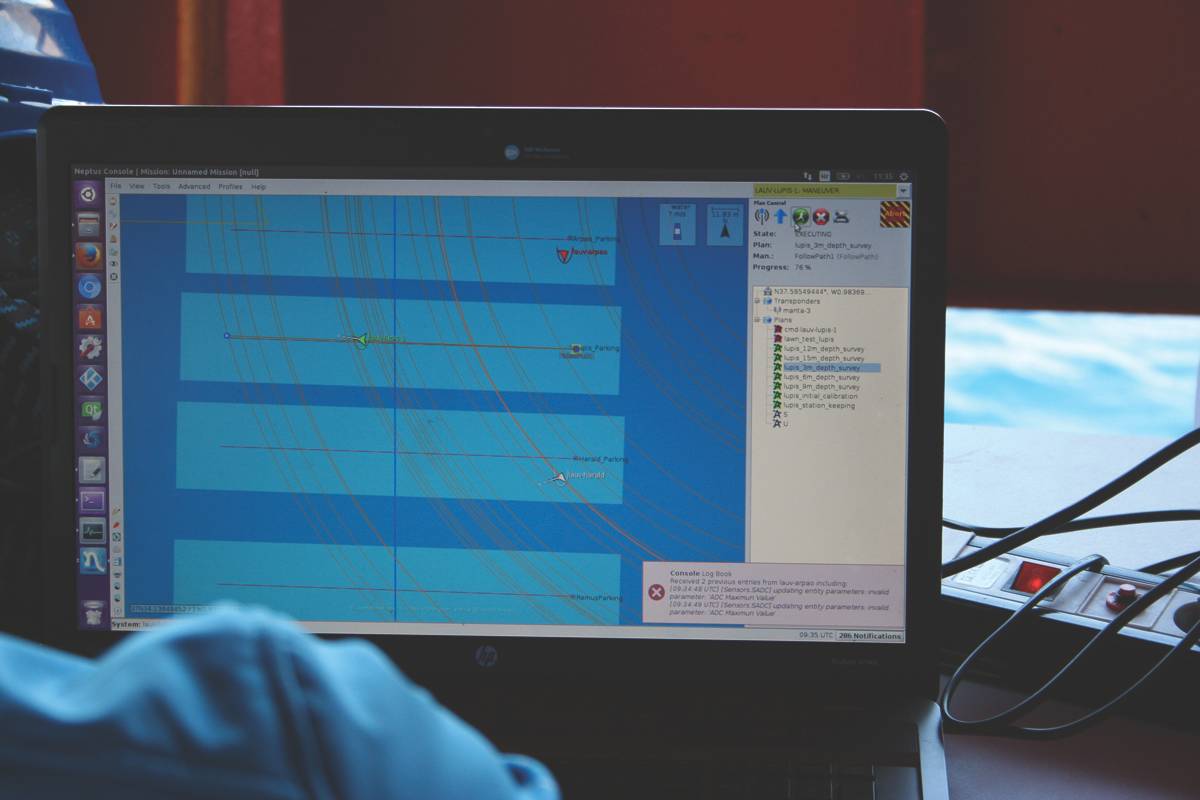
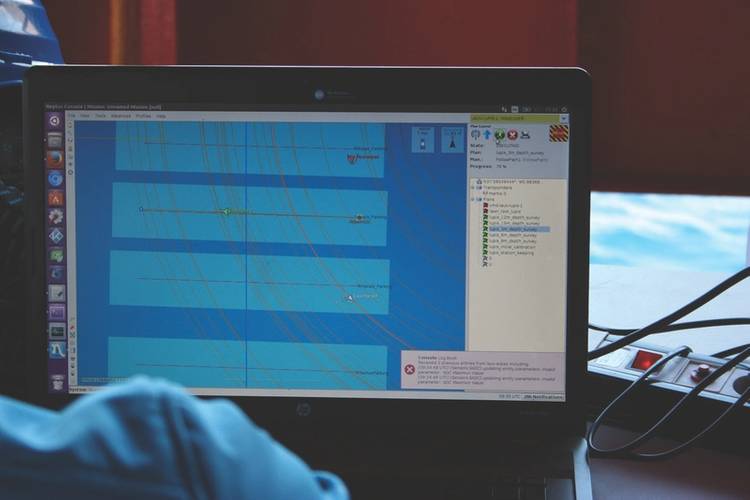 “Neptus” Command & Control software screen monitoring vehicles performing a mission. (Photo courtesy: Javier Gilabert)
“Neptus” Command & Control software screen monitoring vehicles performing a mission. (Photo courtesy: Javier Gilabert)