Lander Lab #2: Small Autonomous Landers for Studying the Community Ecology of Nearshore Submarine Canyons







-
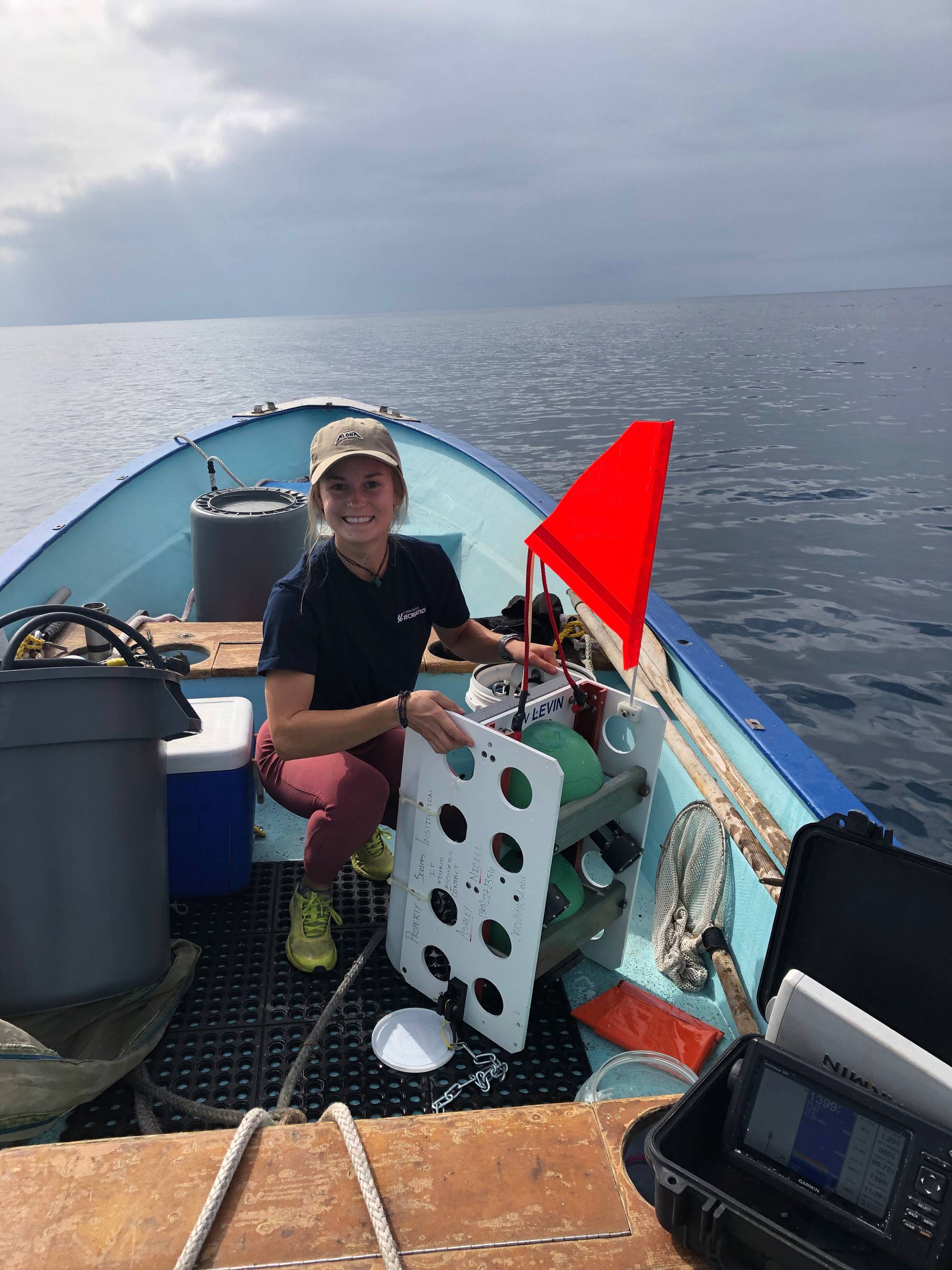
 Figure 1. Graduate student Ashley Nicoll with deep ocean vehicle DOV LEVIN after recovery from an exploratory dive into a nearshore canyon off San Diego, California. (Photo by Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
Figure 1. Graduate student Ashley Nicoll with deep ocean vehicle DOV LEVIN after recovery from an exploratory dive into a nearshore canyon off San Diego, California. (Photo by Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
-
 Figure 6: Swell shark and Spotted Cusk Eel: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
Figure 6: Swell shark and Spotted Cusk Eel: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
-
 Figure 6: Prickly Shark: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
Figure 6: Prickly Shark: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
-
 Figure 6: Spotted Ratfish: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
Figure 6: Spotted Ratfish: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
-
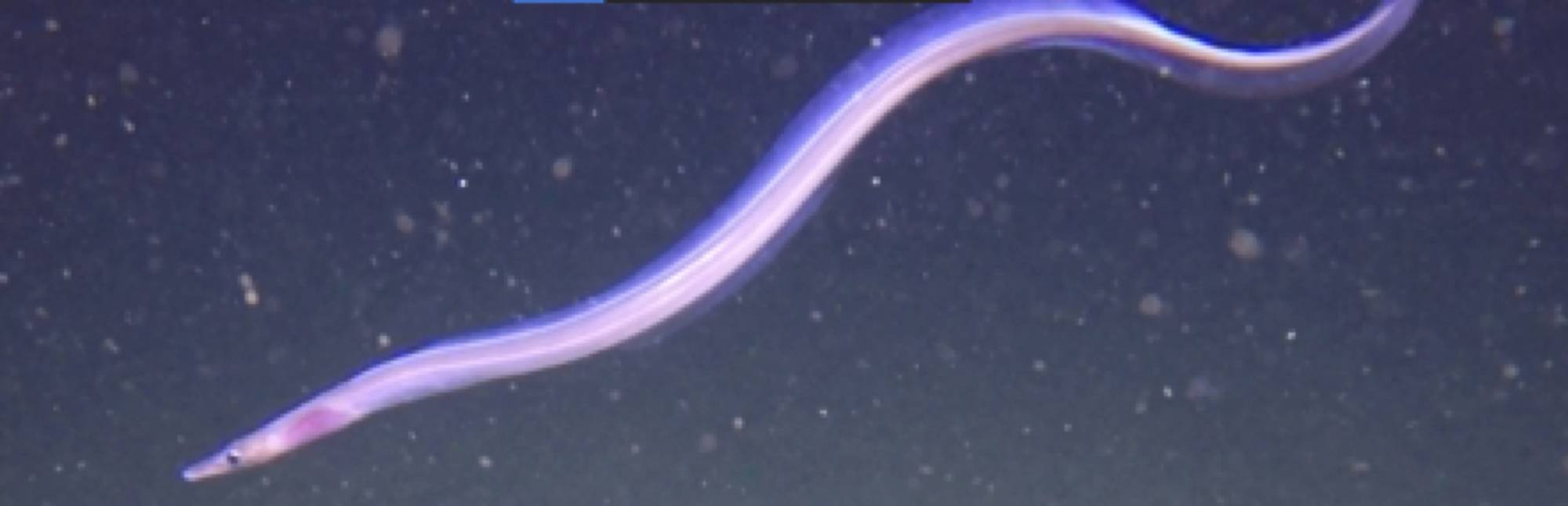
 Figure 6: Dogface Witch Eel: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
Figure 6: Dogface Witch Eel: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
-
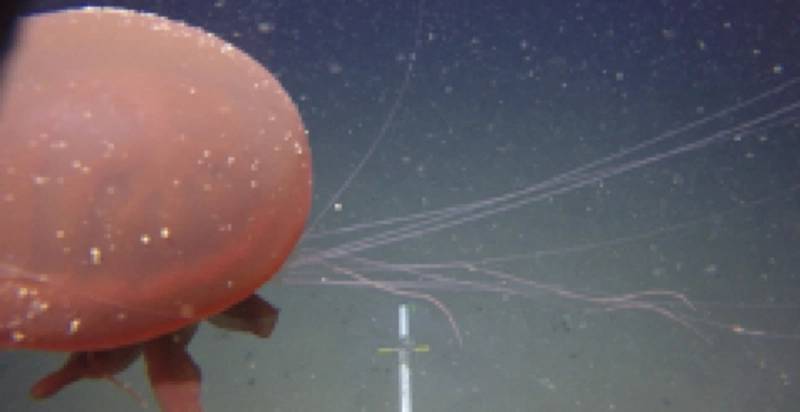 Figure 6: Jelly fish: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
Figure 6: Jelly fish: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
-
 Figure 6: Harbor Seal: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)
Figure 6: Harbor Seal: Images from various lander deployments to provide examples of image quality and unique species observed. (Photos by Ashley Nicoll, Scripps Institution of Oceanography/UCSD.)




Lander Lab will routinely feature field work by researchers from around the world using ocean landers. We begin with the 2021 Scripps Institution of Oceanography/UCSD work of Ashley Nicoll, currently a PhD student at Stony Brook University, Stony Brook, Long Island, New York. Click here to see Ashley’s full Master’s Thesis paper, “Nicoll Thesis 2021.pdf”.
Nearshore submarine canyons are unique features that bring the deep sea close to shore, potentially functioning as highways connecting shallow and deep-sea ecosystems. To study their ecology, we adapted two autonomous lander systems: a Global Ocean Design® LLC 2-sphere Picolander® for exploratory deployments (< 3 days) and a Global Ocean Design LLC 3-sphere Nanolander® for longer deployments (> 1 week). Both landers were outfitted with a novel self-recording digital camera and LED lights system plus a Zebra-Tech® environmental sensor to collect paired physical and biological time series. Eleven lander deployments were completed ranging in length from 1-13 days at depths of 90-500 m, allowing assessment of how seafloor community diversity and composition changed with depth and time of day.
This study also aimed to document the number and area of small submarine canyons off the coast of California. Small canyons are defined as features with a minimum depth of 200m and incised 100m into the slope. Applying this, 23 small canyons were identified, with features concentrated on the Central and Southern coast. By area, 27% of large canyons and 23% of small canyons are protected, with the inshore reaches of canyons receiving more protection than offshore.
Because landers collect paired biological and physical data in hard to access areas, they may serve as powerful tools to inform management of these poorly studied deep-water habitats.
About Submarine Canyons
Scripps professor Francis Shepard defined submarine canyons as “steep-walled, sinuous valleys with V-shaped cross sections, axes sloping outwards as continuously as river-cut land canyons and relief comparable to even the largest of land canyons.” Submarine canyons throughout the U.S. Exclusive Economic Zone (EEZ) and beyond are typically understudied because they are difficult areas to access due to their depths, narrow structure, and proximity to shore. Despite being understudied, these are not rare ecosystems. Professor Ulla Fernandez-Arcaya, Centre Oceanogràfic de Balears, Instituto Español de Oceanografía, Palma, Spain, identified over 9,000 large canyons that cover approximately 11.2% of continental slopes globally. One may presume smaller canyons are more prolific. On the Pacific coast of North America, submarine canyons cut over 20% of the continental shelf on average, and approach 50% at latitudes north of 45 degrees.
Methodology to Study Submarine Canyons
Traditional deep-sea study methods include ROVs, towed cameras on sleds, or trawls, which typically require a medium or a large vessel equipped with an A-frame plus a winch with a slip ring and hundreds of meters of EM cable. The usage of such vessels is costly, time consuming, and logistically complicated when close to shore.
The biology of the deep-sea is traditionally studied using trawls. Because canyons are constricted areas with significant relief, trawls are both destructive and subject to getting caught in rocky outcroppings. In order to avoid dangers associated with trawling complex underwater features, autonomous lander systems can be used to collect environmental and biological data in small nearshore submarine canyons with greatly reduced costs and environmental impact.
This study aims to use the La Jolla Canyon as a testbed for using ocean landers as a tool to study nearshore submarine canyons.
Landers
Two low-cost, spatially flexible autonomous lander systems were used: a Global Ocean Design® LLC Nanolander® Deep Ocean Vehicle (DOV) BEEBE and Picolander® DOV LEVIN (Fig. 2). The Nanolander has three spherical housings containing a camera system, an EdgeTech® BART© (Burnwire Acoustic Release Transmitter) acoustic communication system. A Zebra-Tech™ <www.zebra-tech.co.nz> Moana© sensor is mounted to the frame for measuring temperature and depth. The smaller, two-sphere Picolander is equipped with a Zebra-Tech sensor, camera system, and timed release for up to 99-hour deployments. Both systems are positively buoyant and deployed by hand from a small boat (Fig. 1). The Nanolander can collect paired biological and physical data in the deep sea over a greater timescale (i.e., several weeks). The landers require only a low-cost sacrificial iron drop weight for each deployment.
The Nanolander, DOV BEEBE, was developed by Kevin Hardy for Natalya Gallo (Gallo et al., 2020 <https://doi.org/10.5194/bg-17-3943-2020>; Global Ocean Designs LLC) in 2016. The Picolander, DOV JEAN was developed by Kevin Hardy with Maré Sutphen, now an undergraduate engineering student at CalPoly-San Luis Obispo. The camera and lights systems of both landers were developed by Kevin Hardy with Ashley Nicoll.
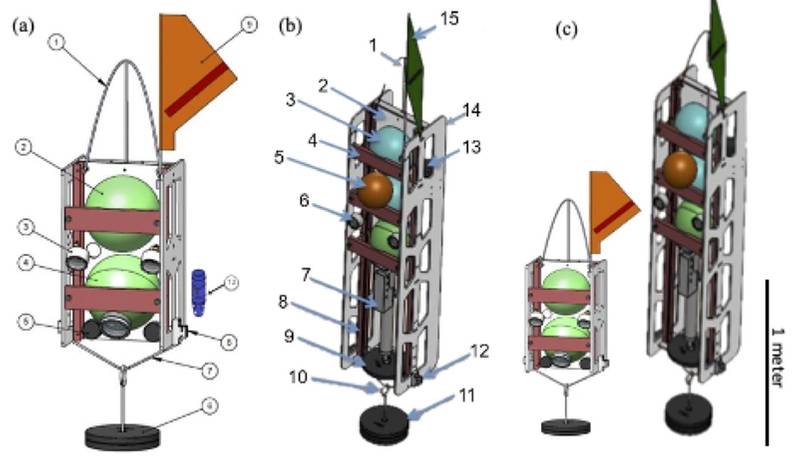 Figure 2: (a) Diagram of the Picolander® DOV JEAN. 1) Spectra® lifting bale; 2) ~25cm polyamide control sphere containing the timed-release system; 3) oil-filled LED lights; 4) ~25cm polyamide camera sphere containing a GoPro® Hero® 4, CamDo® Blink® time lapse controller, V50 Voltaic Systems® battery, 16mAh LiPo battery, and LiPo battery management system (BMS); 5) 1.5-lb counterweights x 2 sides; 6) 25-lbs expendable iron anchor; 7) chain connecting weights to the burnwires; 8) burnwire release and mount x 2 sides; 9) surface recovery flag; 10) Zebra-Tech® Moana pressure and temperature sensor (fastened to the interior of the frame). (b) Diagram of the Nanolander® DOV BEEBE components from Gallo et al. (2020): 1) Spectra lifting bale; 2) HDPE centerplate; 3) ~25 cm polyamide spheres stacked top, middle and bottom, top is the command sphere, middle has 32mAh LiPo battery, and bottom is the camera; 4) sphere retainer; 5) auxiliary ~18 cm flotation sphere; 6) oil-filled LED lights; 7) Seabird MicroCAT-ODO in the lower payload bay; 8) central fiberglass frame; 9) stabilizing counterweight; 10) anchor slip ring; 11) 40-lbs expendable iron anchor; 12) burnwire release and mount x 2 sides; 13) Edgetech hydrophone for acoustic command and tracking; 14) HDPE side panels; and 15) surface recovery flag. Not shown: drop arm on front. (c) To scale images of the landers for size comparison. (Image credit: Kevin Hardy, Global Ocean Design LLC)
Figure 2: (a) Diagram of the Picolander® DOV JEAN. 1) Spectra® lifting bale; 2) ~25cm polyamide control sphere containing the timed-release system; 3) oil-filled LED lights; 4) ~25cm polyamide camera sphere containing a GoPro® Hero® 4, CamDo® Blink® time lapse controller, V50 Voltaic Systems® battery, 16mAh LiPo battery, and LiPo battery management system (BMS); 5) 1.5-lb counterweights x 2 sides; 6) 25-lbs expendable iron anchor; 7) chain connecting weights to the burnwires; 8) burnwire release and mount x 2 sides; 9) surface recovery flag; 10) Zebra-Tech® Moana pressure and temperature sensor (fastened to the interior of the frame). (b) Diagram of the Nanolander® DOV BEEBE components from Gallo et al. (2020): 1) Spectra lifting bale; 2) HDPE centerplate; 3) ~25 cm polyamide spheres stacked top, middle and bottom, top is the command sphere, middle has 32mAh LiPo battery, and bottom is the camera; 4) sphere retainer; 5) auxiliary ~18 cm flotation sphere; 6) oil-filled LED lights; 7) Seabird MicroCAT-ODO in the lower payload bay; 8) central fiberglass frame; 9) stabilizing counterweight; 10) anchor slip ring; 11) 40-lbs expendable iron anchor; 12) burnwire release and mount x 2 sides; 13) Edgetech hydrophone for acoustic command and tracking; 14) HDPE side panels; and 15) surface recovery flag. Not shown: drop arm on front. (c) To scale images of the landers for size comparison. (Image credit: Kevin Hardy, Global Ocean Design LLC)
Six successful exploratory deployments were conducted with the Picolander (Fig. 3). These deployments ranged in length from 26 to 51 hours and targeted depths from 100 to 500 m.
Five successful deployments of eight to 12 days were conducted with DOV BEEBE. DOV BEEBE re-occupied deployments sites from the Picolander except for one site, Pico-D370.
For all deployments, the camera was set to record video for 20 seconds every 20 minutes.
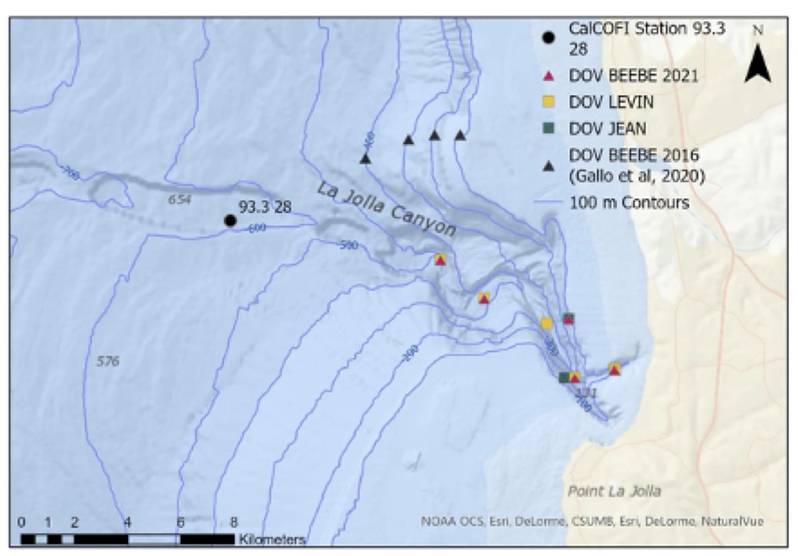 Figure 3: Map of deployment locations in or near the La Jolla Canyon with contour lines plotted every 100 m. The red triangles represent deployments conducted with the Nanolander DOV BEEBE in 2021, the yellow squares represent Picolander deployments conducted with DOV LEVIN, the green square represents the successful deployment of Picolander DOV JEAN, the black triangles represent the DOV BEEBE deployments conducted by Natalya Gallo in 2016 (Ref: Gallo, 2018 <https://escholarship.org/uc/item/6bb6v4z8>; Gallo et al., 2020), and the black circle represents CalCOFI Station 93.3 28. (Image credit: Ashley Nicoll.)
Figure 3: Map of deployment locations in or near the La Jolla Canyon with contour lines plotted every 100 m. The red triangles represent deployments conducted with the Nanolander DOV BEEBE in 2021, the yellow squares represent Picolander deployments conducted with DOV LEVIN, the green square represents the successful deployment of Picolander DOV JEAN, the black triangles represent the DOV BEEBE deployments conducted by Natalya Gallo in 2016 (Ref: Gallo, 2018 <https://escholarship.org/uc/item/6bb6v4z8>; Gallo et al., 2020), and the black circle represents CalCOFI Station 93.3 28. (Image credit: Ashley Nicoll.)
Results
We found that communities at 100 and 500m were distinct from all other depths while the 300m community was transitional between these depths and had the highest diversity, despite unexpectedly high turbidity.
Additionally, we recorded clear diurnal patterns in fishes deeper than 300m, as well as vertical migration of larval flatfish.
Lander Performance
Due to their small design and relative ease of use, the Nanolander DOV BEEBE and Picolander DOV LEVIN made access to nearshore, deep-sea ecosystems straightforward from a small boat.
We found the landers performed reliably collecting paired biological, physical, and biogeochemical data in hard to access areas. Because of this, they can serve as powerful tools to investigate a great diversity of questions from animal behavior to community responses to the environment.
The Picolander design proved to be a good tool for short-term exploratory deployments.
The Nanolander design functioned reliably, and the upgraded camera system accomplished the goals we had for power conservation.
Not surprisingly, incremental improvements for both landers were suggested by field experience.
The Moana TD1000 Temperature and Depth sensor worked without any issues throughout all deployments and had sufficient power and memory capacity for all deployments.
Characterizing Differences in Seafloor Community Diversity
Over the course of the five Nanolander deployments, 3,183 20-s video samples were annotated, and 614 20-s samples were annotated from the six Picolander deployments. Over the course of all the deployments, visibility was worse than expected due to turbidity in the water column. The 300 m deployment had the poorest visibility, where only 9% of samples had good visibility. The 100 m deployment had the best visibility followed by the 500 m deployment, the 400 m deployment, and finally the 170 m deployment.
Despite having the poorest visibility, the highest number of unique operational taxonomic units (OTUs), including invertebrates, vertebrates, and demersal fishes, were observed at the 300 m site with 27 OTUs recorded during of the Nanolander deployments and 16 recorded during the Picolander deployments. The 100 m Nanolander deployment observed the most demersal fish with 16 species observed. For both landers, the least number of OTUs occurred at the ~400 m deployment with the Nanolander observing 19 OTUs while the Picolander observed six.
Comparing Lander Results to Records in the Marine Vertebrate Collection at SIO
A comparison between local, canyon associated species in the Scripps Institution of Oceanography (SIO) Marine Vertebrate Collection (MVC) and the fish species observed by both the Picolanders and the Nanolander was conducted to investigate how many species were common between the two datasets, and how many were unique. This analysis was done with data from Hastings et al. (2014, https://doi.org/10.3160/0038-3872-113.3.200). Hastings’ paper summarized the fishes of La Jolla and the local Marine Protected Areas based on records of specimens in the MVC, began in 1905 and continuing to the present day. Because the study area for the landers began at 100 m, fish whose depth range are shallower than 100 m were filtered out. This list was then compared to the fish species observed throughout all lander deployments. (Figure 4.)
The landers recorded 40 species of fishes throughout their deployments and ~47% of these were also preserved in the MVC at SIO, collected from the local canyon system. The remaining ~ 53% of the fish species observed by the lander were not preserved in the MVC with metadata indicating that they were collected from the local canyon system. It is possible that the disparity between what has been collected from the canyon and what was observed by the lander is due to the different sample collecting methods. Most of the samples from the local canyon system in the MVC were collected using rotenone or dynamite. It is possible that the species observed only by the landers were less susceptible to these methods or did not float up to the surface to be collected. Additionally, the specimens in the MVC were collected over several decades ago and the difference in species observed by the landers and preserved in the MVC could be evidence of a change in the system. This result supports the need for more and diverse sampling efforts in ecological research and proves efficacy of the landers as tools to study nearshore submarine canyon communities.
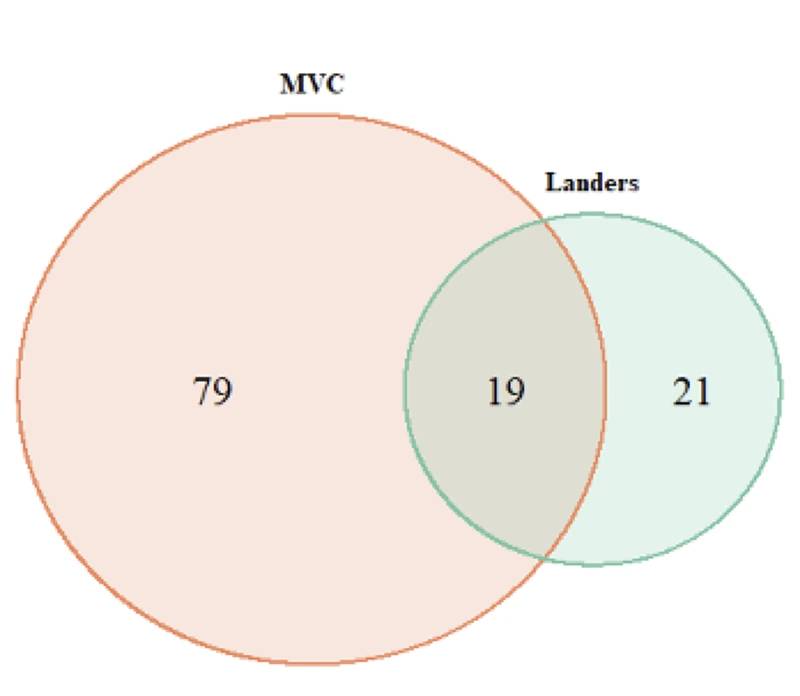 Figure 4: A Venn diagram displaying the number of La Jolla Canyon specimens in the Marine Vertebrate Collection (MVC) at Scripps Institution of Oceanography (SIO) and the number of fish species observed by the landers in the La Jolla Canyon. The overlapping zone represents common species between the two methods. (Image credit: Ashley Nicoll)
Figure 4: A Venn diagram displaying the number of La Jolla Canyon specimens in the Marine Vertebrate Collection (MVC) at Scripps Institution of Oceanography (SIO) and the number of fish species observed by the landers in the La Jolla Canyon. The overlapping zone represents common species between the two methods. (Image credit: Ashley Nicoll)
Diurnal Patterns
It is interesting to note that the species with the clearest diurnal patterns were observed at depths deeper than 300 m. We had expected the diurnal patterns of species to decrease with depth and be most obvious at the shallower deployments.
Conclusions
Nearshore submarine canyons play an important role in connecting nearshore and deep-sea ecosystems. Even so, they are hard to access with traditional deep-sea sampling techniques. Small autonomous landers offer a robust and cost-effective way to study these features, collecting physical, biogeochemical, and biological data.
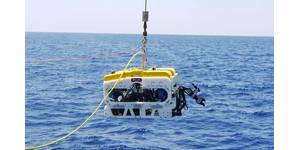
 Figure 5: Photos of the landers upon deployment and/or recovery: a) Nanolander DOV BEEBE in a small skiff. (Photos by Ashley Nicoll and Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
Figure 5: Photos of the landers upon deployment and/or recovery: a) Nanolander DOV BEEBE in a small skiff. (Photos by Ashley Nicoll and Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
 Figure 5: Photos of the landers upon deployment and/or recovery: b) DOV BEEBE floating in the water during a recovery. (Photos by Ashley Nicoll and Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
Figure 5: Photos of the landers upon deployment and/or recovery: b) DOV BEEBE floating in the water during a recovery. (Photos by Ashley Nicoll and Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
 Figure 5: Photos of the landers upon deployment and/or recovery: c) The surface expression of Picolander DOV LEVIN. (Photos by Ashley Nicoll and Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
Figure 5: Photos of the landers upon deployment and/or recovery: c) The surface expression of Picolander DOV LEVIN. (Photos by Ashley Nicoll and Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
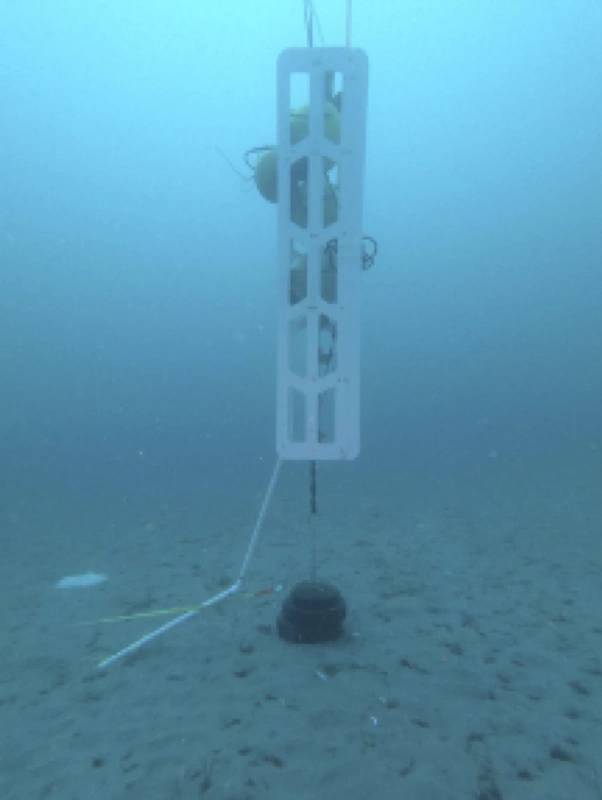 Figure 5: Photos of the landers upon deployment and/or recovery: d) DOV BEEBE deployed at ~ 24 m (80ft). (Photos by Ashley Nicoll and Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
Figure 5: Photos of the landers upon deployment and/or recovery: d) DOV BEEBE deployed at ~ 24 m (80ft). (Photos by Ashley Nicoll and Phil Zerofski, Scripps Institution of Oceanography/UCSD.)
Column Sponsor: