SEABER MARVEL Micro-AUV Maps Beach for Littoral Reconnaissance


-
 © SEABER
© SEABER
-
 © SEABER
© SEABER

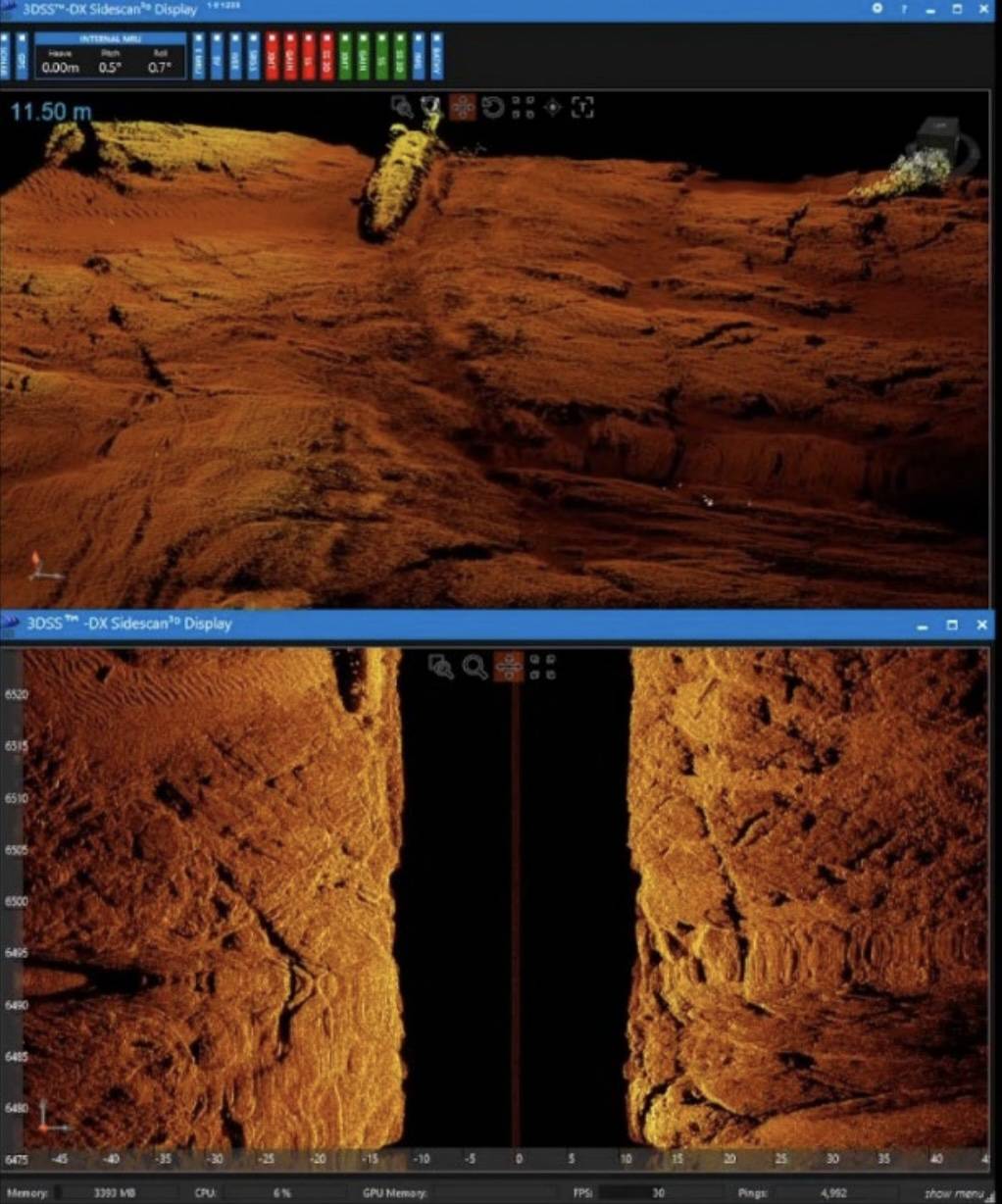
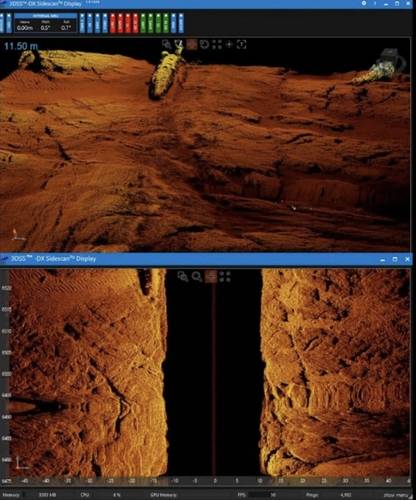
The integration of an interferometric 3D side-scan sonar (3DSS) into SEABER's MARVEL micro-AUV represents the first time worldwide that such a payload has been successfully miniaturized for a micro-AUV platform.
Based on patented CAA 7/ technology, the 3DSS simultaneously delivers high-resolution 2D imagery, true 3D seabed reconstruction, and centimetric-scale bathymetry from a single, compact system. In operational testing, a single MARVEL-3DSS mapped a 300 × 150-meter beach approach zone in under 30 minutes, up to ten times faster than legacy solutions, with minimal acoustic signature and no requirement for specialist personnel. This breakthrough enhances amphibious beach reconnaissance capabilities for naval forces, special operations units, and mine countermeasure teams operating in contested littoral environments.
The Limits of Existing Reconnaissance Methods
In modern littoral warfare, precise knowledge of the seabed is essential before any amphibious landing. Channels, sandbars, obstacles, mines, and sediment structure all directly affect landing craft routes, timing, and survivability, yet existing reconnaissance methods each carry significant operational constraints.
Combat divers offer high precision but are slow, cover limited areas, and face serious exposure risks in contested environments. Towed sonar systems provide better coverage but remain highly detectable from the surface and perform poorly in shallow waters. Small autonomous underwater systems improve discretion but rely on basic 2D sonar payloads and require frequent surfacing for GPS recalibration, preventing them from generating the high-resolution three-dimensional seabed models that modern operations demand.
The MARVEL-3DSS
The SEABER MARVEL micro-AUV measures 12 centimeters in diameter, runs on fully electric propulsion, and can be deployed by a single operator from a rigid-hull inflatable boat with no hydrographic expertise required.
It carries a PingDSP next-generation interferometric 3D side-scan sonar, the first time worldwide such a payload has been miniaturized for a micro-AUV. Based on patented CAATI (Computed Angle-of-Arrival Transient Imaging) processing, the 3DSS simultaneously delivers high-resolution 2D side-scan imagery, true 3D seabed reconstruction, and centimetric-scale bathymetry in a single run.
In operational testing, a single MARVEL-3DSS mapped a 300 x 150-meter beach approach zone in approximately 30 minutes, following three survey lines spaced 40 meters apart. The system operates efficiently in water depths from 0 to 40 meters, maintaining near-bottom stability without image quality degradation. Upon recovery, commanders receive a complete 3D model of the approach zone ready for direct integration into mission planning tools.
The MARVEL-3DSS ensure a near-total acoustic and visual discretion throughout the mission, critical for covert pre-assault reconnaissance in contested environments.
Engineering Challenges and Development Process
Integrating this sonar into a 12-centimeter vehicle required a complete redesign of the MARVEL's payload architecture: mechanical miniaturization, a dedicated data-flow management board, dual Ethernet interfaces, and significantly expanded onboard storage.
Maintaining full software interoperability with PingDSP's processing suite despite the transition to an embedded architecture was among the most complex challenges of the program, requiring multiple joint test and validation cycles conducted by SEABER and PingDSP/Norbit throughout 2024 and 2025.
Current Limitations and the Road Ahead
In deeper waters (between 40 and 250 meters), the onboard DVL can lose bottom contact, resulting in accumulated inertial drift and reduced geo-referencing accuracy. Operators currently mitigate this through intermittent USBL acoustic position corrections from a surface platform, but it reduces mission stealth and requires an additional surface asset.
The large datasets generated by 3DSS systems also impose higher storage requirements and longer post-processing times.
Future developments will focus on low-drift inertial navigation algorithms, embedded processing for anomaly detection, and adaptive acoustic techniques for complex surf-zone environments.














