AutoNaut Completes a 16-week, 4,000-mile Mission on the Atlantic continental shelf break

Image courtesy AutoNaut
AutoNaut ‘Oban’ arrives quietly into Penzance after waiting out Storm Arwen off Mount’s Bay. The 115-day voyage covered 4,000 nautical miles gathering data on the Atlantic shelf break from the Hebrides to Cornwall.
A proving trial for ‘AutoNaut for Extreme Environments’ in autumn 2021 saw the 5m uncrewed surface vessel (USV) spend 16 weeks at sea and cover over 4,000 nautical miles on the continental shelf break in the Atlantic. Data gathered by PAM, ADCP, CTD, and wave sensors was distributed free to partners. Data analysis continues in 2022. Preliminary results include what is believed to be the first acoustic detection of a Kogia pygmy or dwarf sperm whale in UK waters.
This was a great result for the new Seiche light weight hydrophone array designed for USV deployment. It is fitted to a fin under the keel, rather than requiring a towed array of hydrophones. The new system registered 23 acoustic encounters with dolphin species and 21 encounters with harbor porpoise, during transits through the Sea of the Hebrides and Stanton Bank Special Areas of Conservation (SAC).
AutoNaut has a unique wave propulsion system using just pitch and roll, which means the boat itself has a quiet sound profile and provides a 360° sound picture because there is no propeller noise. Earlier sound surveys in the Gulf of Mexico and off Sao Tome demonstrated that cetaceans do not swim away or stop vocalizing. For a PAM baseline survey this is excellent.
A 25m-long towed thin-line PAM array is also used, but as the new high latitude AutoNaut is designed for the roughest places in the world, such as the Southern Ocean in winter, capsize and pitchpoling is expected. A long, towed array might get tangled, and it causes more drag.
The success of this 115-day mission was tempered by a fault that developed in the charge control system between PV panels and a bank of new lithium batteries, reducing hotel power. As a result, the original plan had to be rerouted and less data was collected. This issue was quickly solved after the operation completed.
The long mission in the Atlantic proved the robustness of the AutoNaut wave-propulsion system, and demonstrated new developments to scientific and commercial stakeholders, one of the objectives of the project. With no fuel and no mothership required, AutoNaut offers a long endurance ocean going platform that is zero carbon.
The aim of the ‘AutoNaut for Extreme Environments’ project, funded by Innovate UK, is to develop the wave propelled USV to be capable of operating at high latitude, eventually in winter. The initial three-year project was interrupted by Covid 19. IUK funded this extension proving trial in 2021. It was also impacted by Covid, starting three months later in the year, by which time winter was approaching, and without additional the battery power that had been planned.
Technology challenges for high latitude operations include anti-icing, the detection and avoidance of small ice in the waves, ice abrasion, materials combinations suitable for extreme cold, and providing ‘hotel’ power when it is dark for command, control and communications, as well as sensors and other electronics.
The AutoNaut wave propulsion system, which works much like a penguin’s wings but with no muscle required, does not produce electrical or other power. But it is inherently very simple, robust and quiet, and therefore suitable for extreme environments where it is dangerous to send ships. PV panels on deck are normally used to provide hotel power. For long endurance at high latitude in winter another power solution is required. This is being explored further. Image courtesy AutoNaut
Image courtesy AutoNaut
In addition to these novel technological challenges the boat itself was ‘hardened’ to be capable of surviving repeated capsize and pitchpoling in the famously rough Southern Ocean. Destructive drop and ice-impact tests were carried out in phase one to test newly designed rudder, struts, foils, fixing inserts, hatches, and hull parts. The 4,000 nautical mile voyage validated these improvements.
In the initial project the University of East Anglia used its ‘sea-ice chamber’ facility to test all aspects of anti-icing and the effects of extreme cold and ice abrasion on build materials and PV panels. This proving trial showed the anti-icing solution remains effectively hydrophobic after 115 days at sea. It had already had a year of environmental exposure ashore.
In phase one a method to detect small ice in big waves was identified. Work continues ashore with IR video and machine learning to inform the existing collision avoidance system.
Also in Phase 1, University of Exeter developed a pendulum motion energy harvester. This was not installed for the extension proving trial as Covid had prevented its further development. Other ways of providing hotel power such as a fuel cell were tested, and overheated in phase one, as well as state-of-the-art batteries.
In this extension trial a further reduction in available hotel power was caused by a low ‘bridge’ fitted instead of the usual sprung mast, carrying antenna, AIS, weather station, radar transponder and nav light. The thinking had been that in Southern Ocean storm seas the USV would be repeatedly capsized and pitchpoled, making a mast more vulnerable to breakage.
On this proving voyage the AutoNaut was capsized in storms several times, and the bridge was undamaged. However, in the low winter light the bridge shaded the PV panels and cut power input, and its low profile also reduced the range of AIS, radar transponder and nav light. Short sprung masts will do a better job in future.
As well as successfully verifying the technological solutions developed in phase one, the extension trial was designed to demonstrate AutoNaut’s new potential to external stakeholders. Enter SAMSThe Scottish Association for Marine Science (SAMS) partnered and helped to develop the science program. Other stakeholders became associated in the data collection program as the project developed and the route changed. These included the Irish Marine Institute, Galway Marine Institute of Technology, OSNAP and iFADO partners, NOC, CEFAS, University of Exeter, and the UK Met Office. The data collected are made freely available to all partners.
The sensor fit for this deployment was loaned to AutoNaut, for which we are grateful. It comprised:
- Nortek Signature500 ADCP, fitted through the hull
- Seiche PAM, fitted to a small fin below the hull rather than as a towed array
- Aanderaa / Xylem Motus wave sensor, fitted internally
- SBE 49s CTD, loaned by UEA, fitted externally to the hull (depth not used)
- AirMar weather station, fitted to low bridge
The original route plan was to be a 90-day deployment from SAMS in Oban, following the Extended Ellett Line out to Rockall and then north towards Iceland, before transiting west some way towards Greenland, with return to Oban.
This changed as the start was delayed from May to August due to Covid impacting supply and resources. Also obtaining diplomatic clearance to collect data in the EEZ of other nations normally takes six months, and conditions were attached.
The plan then developed to follow the Ellett line to Rockall collecting data for comparison with underwater gliders and moored subsurface sensors, and then head west to the mid-Atlantic ridge where the OSNAP project (Overturning in the North Atlantic Program) has a further array of moored sensors. This mission would provide a rare opportunity to obtain contemporaneous comparable data from the surface, as well as most of the sub-surface water column. The route also had the advantage of avoiding all EEZs, and remaining at a lower latitude with more sunlight later in the year than Iceland and Greenland.
On August 4, AutoNaut was towed into the Firth of Lorne by SAMS support vessel Seol Mara. All systems and sensors were working well. A watch of remote operators, largely based in Cornwall, guided the vessel via satellite, passing lighthouses, islands and the CEFAS Blackstones Wavebuoy, out into the open sea.
AutoNaut can steer a track between waypoints within a few meters of the line. A feature that was used to good effect in getting safely offshore, and later in completing repeated precise ‘hour-glass’ transects over moored acoustic sensors.
After two days an intermittent fault showed that charge from one of the PV panels was not getting through a complex charge control system to new Li batteries. Over some days this became a permanent fault. It later transpired that charge from all of the PV panels was reduced. A new configuration has since been tested satisfactorily.
 Image courtesy AutoNaut
Image courtesy AutoNaut
The plan to run the different sensors at specific locations evolved as the voyage developed. In part due to the weather dependent schedules for SAMS and Irish partner glider deployments and moorings recovery and maintenance, and also due to the proximity of the Irish EEZ. AutoNaut only got consent to enter the EEZ as she started the first 30-km hourglass transects over Stanton Bank, right on the EEZ line. AutoNaut is grateful to the Irish Government and UK Foreign and Commonwealth Office for expediting this consent.From Stanton the route proceeded north to S1, and another series of precise hourglass transects over an acoustic mooring, and then further north to OSNAP mooring RTEB1, on the shelf break to the Rockall Trough. At this point the lack of hotel power was becoming acute. AutoNaut was put into a holding position while the batteries slowly recharged, and clouds endlessly covered the sun.
An interrupted series of ADCP transects was completed at mooring RTEB1E, which is equipped with subsurface CTDs and current profilers. Those data are now being analyzed. The concept was for AutoNaut to collect contemporaneous surface data on currents, contributing to the study of the sub-polar meridional overturning current, which plays a significant role in Europe’s weather. While it is not yet known if the datasets will be exploitable scientifically due to interruptions for recharging, they will provide valuable technical information and will allow further system improvements (for example in terms of sensor mounting, navigation system integration, operational best practices).
The decision was made to head south to obtain longer daylight and higher angles of sunlight. As AutoNaut made her way towards Ireland a replacement power management controller became available on loan from University of East Anglia’s AutoNaut ‘Caravela’ (in for repair after being damaged in a shipping container after a successful deployment from Barbados). AutoNaut Oban was brought into Blacksod in NW Ireland, the PMC swapped out, and the boat charged up and redeployed. Data was downloaded and distributed to partners, allowing some analysis to get started early.
From Blacksod the opportunity was taken to go out 200 nm to the Irish Met Office buoy M6 on the shelf break, with a plan to zig zag down the shelf break running ADCP and PAM transects. Also, at M6 it was possible to collect wave data in a box around the buoy, to facilitate comparison of met-buoy and USV data. This could provide met offices with a zero-carbon option for collecting such data in future. Later analysis showed these wave data compare well.
Lack of hotel power, even with three PV panels working, limited the ADCP and PAM data gathering that was possible on the zig zag of transects heading south down the shelf break. The intention had been to finish by reaching out to the PAP-SO mooring in the abyssal plain, but when the batteries showed 0% it was decided to recover.
To be safe, a seagoing tug was hired from Southern Ireland, successfully recovering the AutoNaut in 4-5m waves. The USV was recharged on the journey back to Ireland while the office wrestled with Brexit import / export complications and the possibility the boat might be stuck in customs for months. It was decided to get the tug to relaunch close to the M3 Met Office buoy. With full batteries, a transect close to the M3 buoy was run with the wave sensor switched on.
Calculations indicated AutoNaut ‘Oban’ should make it back to Penzance in Cornwall with 10% battery in reserve. As she did, waiting offshore from St. Michael’s Mount until Storm Arwen blew through, and then quietly entering the bay for pickup within a mile of the harbor wall, as if nothing had happened.
Data gathered has been distributed to partners and is being analyzed, completing the extension project in March 2022.
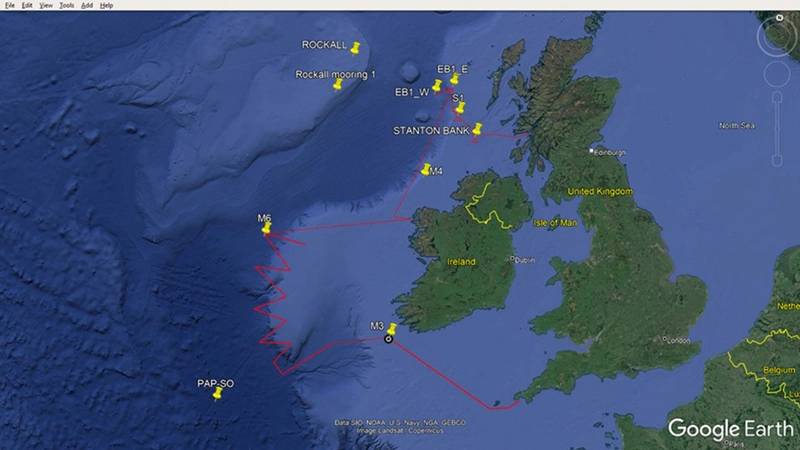 Simplified Route Map. Image courtesy AutoNaut
Simplified Route Map. Image courtesy AutoNaut
Lessons Learned:
- The boat itself performed beautifully, and arrived without a barnacle
- The charging system produced a problem for the first time. Li batteries take more care to set up than the lead gel batteries we used to use as ballast.
- For high latitude work, and more power-hungry sensors, this confirmed we require an additional way to provide hotel power, preferably by harvesting energy on the fly.
- The sensors performed as designed. On first examination all data looks good. The wave data compares well with the M6 met buoy data, offering a possible zero-carbon option for future metrology; the PAM fin analysis showed effective baseline detections at the higher frequencies; ADCP and CTD data is good, and analysis will show whether this is a worthwhile way to collect surface data relevant to ocean currents and climate changes in future.
- Remote Operators (pilots, who can be based anywhere in the world with an internet connection) must be given a clear brief on how a particular boat is wired up. In this case the GNSS was wired in with the CTD rather than the ADCP, for which the GNSS data is required. Normally this would not matter, but when the CTD was cycled to save power that section of ADCP data was degraded too.
- ‘External stakeholders’ were wonderfully helpful.
- This was also a lesson in ‘extreme piloting’. Remote operators found that when AutoNaut was hundreds of miles offshore they could switch off the rudder to save power and the USV would take up a course relative to the wind and waves. This could be used to advantage to reduce the requirement for hotel power. They also learned to use the heading to maximize the PV charge and prevent shadowing on the rare occasions when the sun chose to smile.