Underwater Vehicle Concept Inspired by Golf Balls
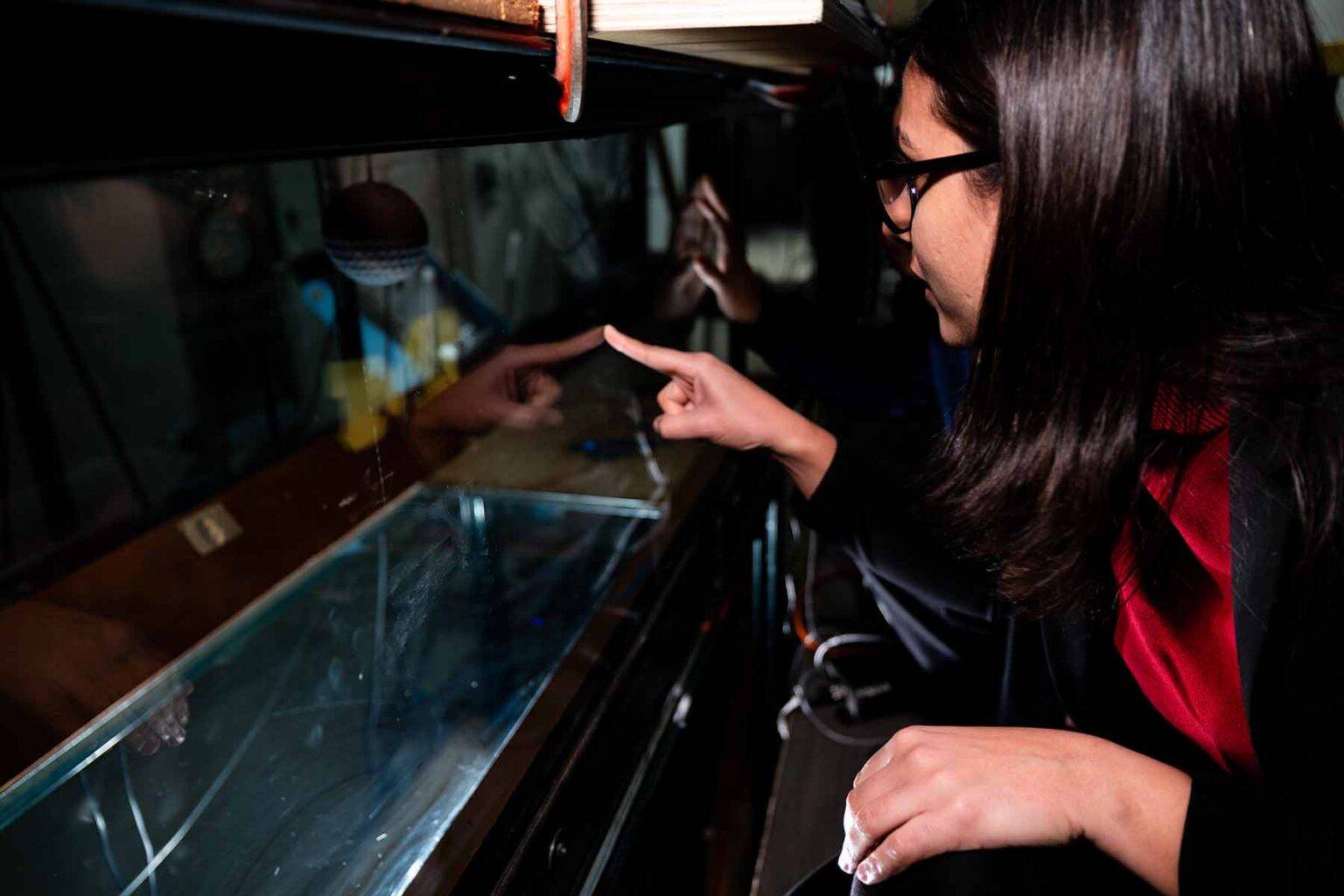
Anchal Sareen observes a 3D printed sphere suspended in a wind tunnel during testing. Image credit: Jeremy Little, Michigan Engineering
Underwater vehicles with dimples like golf balls could be more efficient and maneuverable, a new prototype developed at the University of Michigan has demonstrated.
These nimble vehicles could access typically hard-to-reach areas in the ocean while conducting surveillance, mapping new areas or collecting data on water conditions.
Golf ball dimples cut through pressure drag—the resistance force an object meets when moving through a fluid—propelling the ball 30% further than a smooth ball on average.
“A dynamically programmable outer skin on an underwater vehicle could drastically reduce drag while eliminating the need for protruding appendages like fins or rudders for maneuvering. By actively adjusting its surface texture, the vehicle could achieve precise maneuverability with enhanced efficiency and control,” said Anchal Sareen, U-M assistant professor and corresponding author of two studies published in Flow and The Physics of Fluids.
Sareen and colleagues formed the prototype by stretching a thin layer of latex over a hollow sphere dotted with holes, resembling a pickleball. A vacuum pump depressurizes the core, pulling the latex inwards to create precise dimples when switched on. Turning off the pump makes the sphere smooth again.
The smart morphable sphere can also generate lift, allowing for controlled movement. Often thought of as the upwards force responsible for keeping planes in the air, lift can work in any direction as long as it is perpendicular to the direction of the flow.
To achieve this, researchers designed the inner skeleton with holes on only one side, causing the sphere to develop one smooth and one dimpled side when activated.
This created asymmetric flow separation on the two sides of the sphere, deflecting the wake toward the smooth side. By Newton’s third law, the fluid applies an equal and opposite force toward the rough side, effectively pushing the sphere in the direction of the dimples. Dimples on the right generate force to the right while those on the left push left. This enables precise steering by selectively activating dimples on the desired side.
Looking ahead, Sareen anticipates collaborations that combine expertise in materials science and soft robotics, further advancing the capabilities of this dynamic skin technology.
“This smart dynamic skin technology could be a game-changer for unmanned aerial and underwater vehicles, offering a lightweight, energy-efficient and highly responsive alternative to traditional jointed control surfaces,” she said. “By enabling real-time adaptation to changing flow conditions, this innovation promises to enhance maneuverability, optimize performance and unlock new possibilities for vehicle design.”